Extract Median Ground Points
Summary
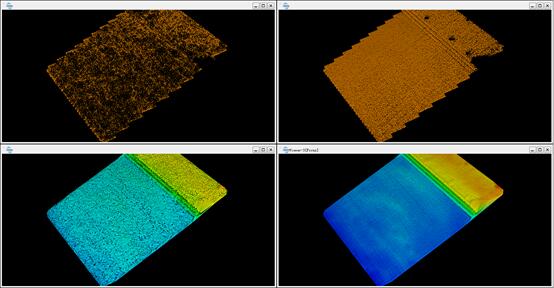
Point clouds generated from data collected by small aircrafts and unmanned aerial vehicles (UAVs) typically have many ground points and individual point densities in these regions can be very high. Traditional point cloud filtering methods used to thin these high density regions often produce ground point subsets with vertical thicknesses that can be measured in centimeters. When these filtered point clouds are used to create 3D mesh objects (e.g. TINs), the results tend to be poor as the 3D modeled surfaces have an uneven appearance. The Extract Median Ground Points tool can be used to obtain a ground point cloud that is thinner and smoother than those produced using traditional point cloud filtering methods. Generating this type of ground point cloud allows for consideration of the points found in a denser and thicker ground point cloud. This method belongs to the optimization step after the initial ground point has been extracted. Therefore, the point cloud data must first be classified using ground point classification method. The comparison results before and after using the median ground point classification method are as follows:
Usage
Navigate to and click on Classify > Extract Median Ground Points
Settings
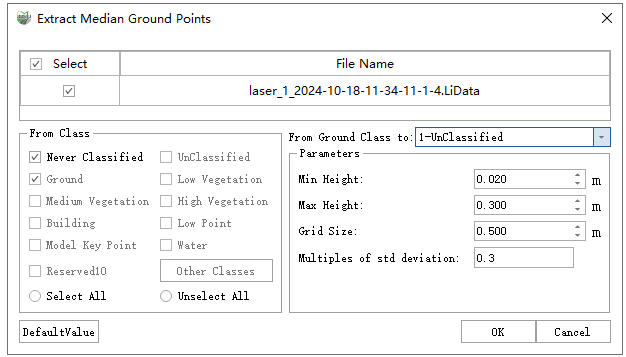
- Input Data: Single or multiple point cloud data files can be input into the tool. Each point cloud must contain points classified as ground points and have been loaded in the LiDAR360MLS software.
- From Class: Source class(es) that represent ground points or other points are included in the median ground points finding operation.
- From Ground Class to: Classify target ground points that do not meet the median rule to this class.
- Min Height (meters, default value is "0.02"): The minimum height above the lowest ground point elevation found in the input file(s)from which ground points will be taken and used to find the median ground point elevation. Ground points falling below the Min Height will not be used to find the median ground point elevation value. The default value is set to 0.02 meters.
- Max Height (meters, default value is "0.3"): The maximum height above the lowest ground point elevation found in the input file(s)from which ground points will be taken and used to find the median ground point elevation. Ground points falling above the Max Height will not be used to find the median ground point elevation value. The default Max Height value is set to 0.3 meters.
- Grid Size (meters, default value is "0.5"): The grid size defines the horizontal extents of the square area from which ground points will be extracted from the input file(s)and then used to find a median ground point elevation value for each grid cell. When the number of points in a grid cell falls below a user-defined threshold, the median ground point elevation for that grid cell will not be included in the output dataset. The default Grid Size is 0.5 meters.
- Multiples of Std Deviation (default value is"0.3"): The number and thickness of the extracted point cloud ground points are controlled by the user-defined Multiples of Std Deviation parameter. The default value is 0.3, which means that 22% of ground points are extracted as ground points. Moreover, a value of 0.5 Multiples of Std Deviation corresponds to 40% of all points classified as ground points being extracted. 0, 7 corresponds to 50%, 0.9 corresponds to 62%, and 1.5 corresponds to 86%.
- DefaultValue: Click to set all Extract Median Ground Points tool parameters to their default values.
Note: This classification algorithm is only applicable to thicker ground point data scanned by small aircrafts and unmanned aerial vehicles (UAVs). This data must be classified by ground points first, as an optimization step.