The Data Organization Structure of SLAM processing
.mscan stands for multiple scans, meaning multiple scans, that is SLAM Project.
A project contains multiple .liscan files, which are individual processing tasks.
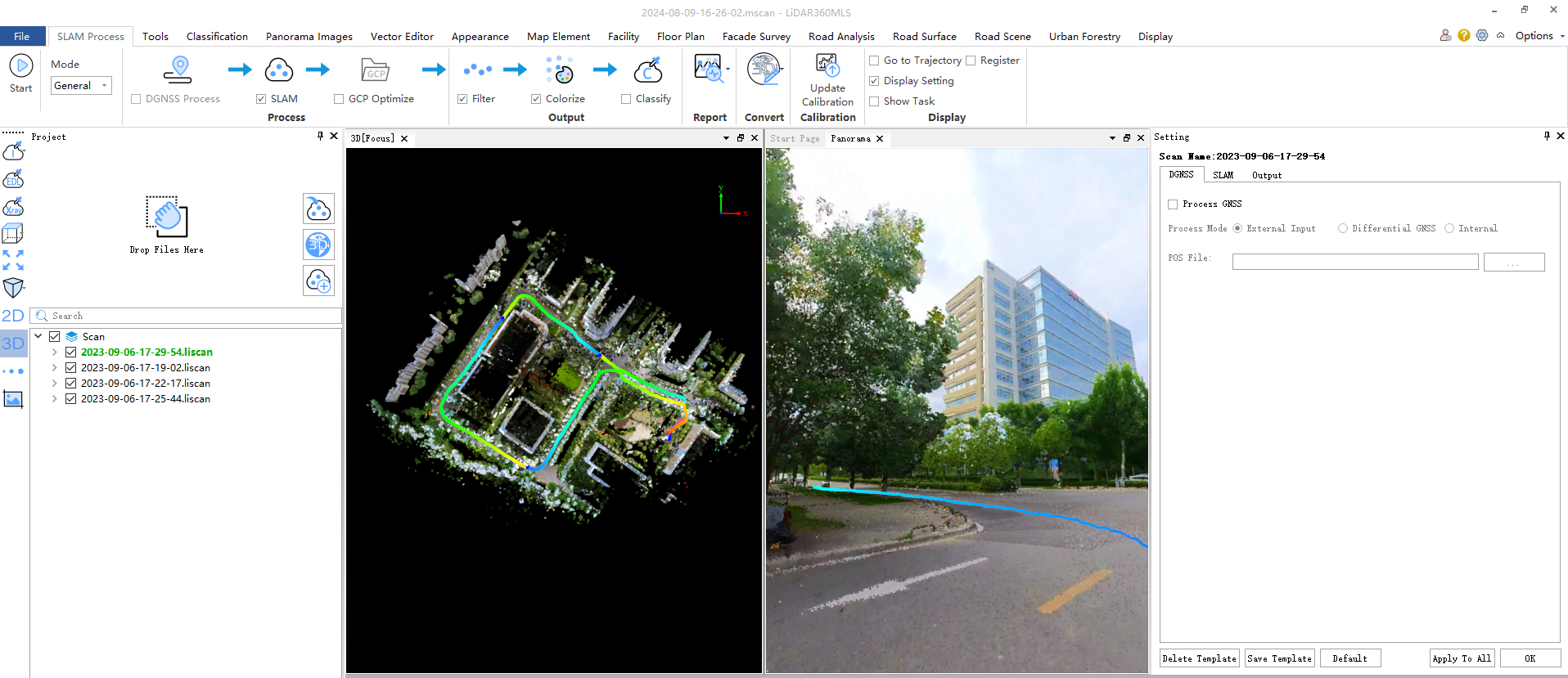
In the program interface, you can see the project .mscan and individual processing task .liscan.
Description of SLAM processing result folder structure
After the data processing is completed, the data directory has the following structure.
Info: SLAM mode information.

LiNav: PPK working folder.

Among them, the Extract folder contains intermediate results of the original data converted by PPK; The POSProc folder is the PPK processing result folder, containing PPK reports, PPK latitude and longitude results, etc.
Log: Contains PPK processing LOG(DGNSS_Process_log.txt) record files and SLAM processing LOG record files(SLAM_log.txt); These two types of LOG files can be sent to technical support or after-sales for problem data localization analysis.

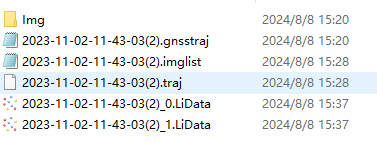
Result: Final data output folder, containing pointcloud data (.lidata), image data (Img folder and image POS information .imglist), SLAM trajectory data (.traj), GNSS trajectory data (.gnsstraj), etc.
Lidata will be segmented every 5 minutes; for example, if the scan lasts 23 minutes, it will be divided into 5 segments of data.
Temp: Intermediate results folder, containing some intermediate results of colorization and SLAM.
