Placement Error Calculation
The software provides two ways to eliminate placement errors:
1.Manual measurement and inspection.
2.Automatic adjustment correction.
Their principles are described in detail below.
Manual Measurement and Inspection
First, you need to prepare the inspection data, usually flying in four directions perpendicular to each other, front, rear, left and right. After the flight, regular objects on the ground (such as playgrounds, regular houses, etc.) are measured. Based on the overlapping laser foot point data, step-by-step geometry can be used (Zhang et al., 2010) to recover the correction value of the placement angle error (that is, the amount of rotation). However, the placement offset error (that is, the translation amount) has a small impact, and manual measurement and inspection will not correct it.
Estimate the Roll Angle Error (ΔRoll)
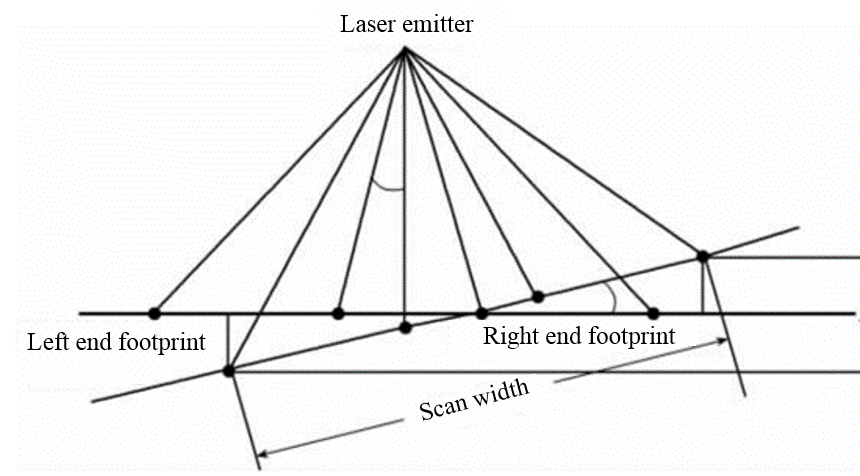
The placement angle error of the side roll will cause the plane scanning line to tilt (as shown in the figure below), and the plane position of the scanned object will be offset along the scanning direction (perpendicular to the flight direction).
In the data of the two air belts flying back and forth at the same altitude
- Open the profile perpendicular to the direction of flight to measure the height difference of the approximate object of the same name.
- Measure the horizontal distance r between the approximate object of the same name and the center line of the two air belts in the 2D view.
The estimation formula for the roll angle error is as follows:
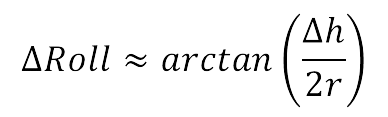
Estimate Pitch Angle Error (ΔPitch)
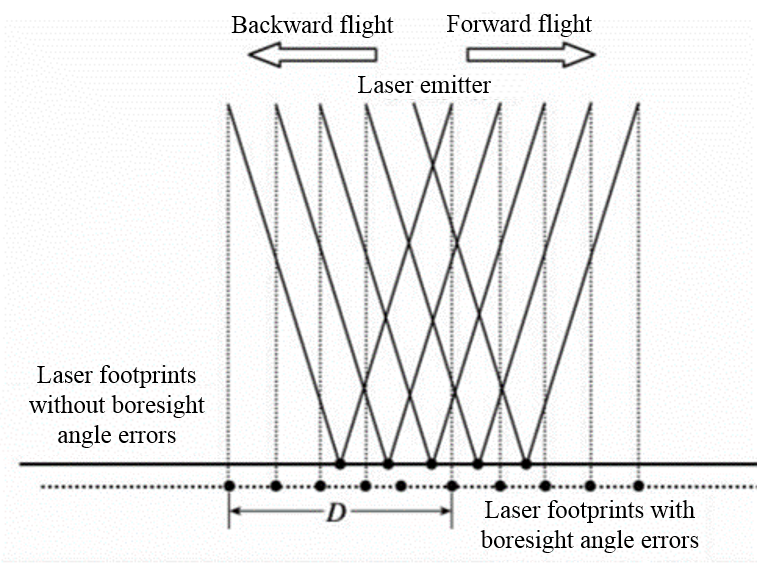
In the online scanning mode, the placement error of the pitch direction mainly deviates the true position of the scanned object in a direction perpendicular to the scanning line. The following is a schematic diagram of the influence of pitch direction placement error on the scanning laser foot point.
In the data of the two air belts of the round-trip flight:
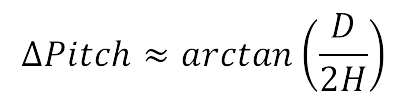
- Open the profile parallel to the flight direction to measure the distance difference D between the center position of the same object along the flight direction.
- Calculate the average flight altitude H based on the trajectory (try to keep the round-trip flight altitude as consistent as possible).
The estimation formula for the pitch angle error is as follows:
Estimate Heading Angle Error (ΔHeading)
The heading angle placement error will change the center position of the scanned object and deform the object at the same time, as shown in the figure below.
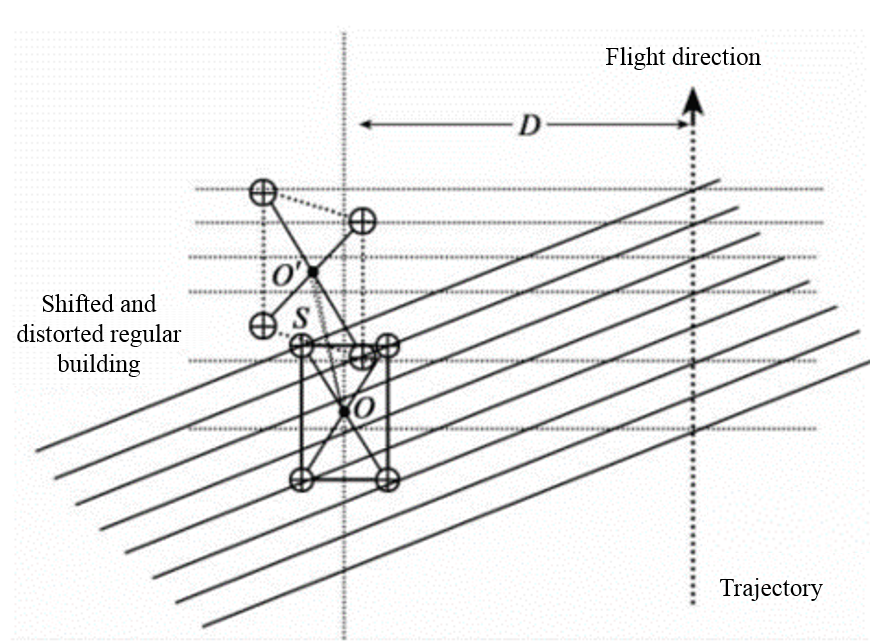
Open a 2D view in the data of the two air belts of forward and backward flight
- Measure the distance S between the average center position of the laser foot of the object twice.
- Measure the distance D between the two air belts.
The estimation formula for heading angle error is as follows:
Automatic Adjustment Correction
Manual measurement estimation requires relevant professional knowledge and proficient operation of the software, while automatic calculation can greatly reduce the workload of the operators. In data with obvious characteristics, automatic calculation can completely replace manual calculation and achieve the same or even higher accuracy.
The automatic algorithm can not only correct the placement angle error (that is, the amount of rotation), but also correct the placement offset error (that is, the amount of translation). You can freely choose the values that need to be corrected, and it is recommended to correct only the placement angle errors because they have the greatest impact. The principle of the algorithm is as follows:
1.Extract feature points and normal vectors in adjacent air belts, refer to the algorithm (Glira et al., 2015).
2.Match the feature points extracted from the adjacent air band to obtain the relevant point pairs.
3.Establish a placement error correction model and calculate the distance of the relevant point pair along the normal vector.
4.The least squares method is used to minimize the correlation distance and obtain the optimal solution of the corrected value at the same time.
@inproceedings{
author={Zhang Xiaohong, Forsberg Rene},
title={Retrieval of Airborne Lidar Misalignments Based on the Stepwise Geometric Method},
booktitle={Survey Review 42(316):176-192 April 2010},
year={2010}, }@inproceedings{
author={Philipp Glira, Norbert Pfeifer, Christan Briese and Camillo Ressl},
title={A Correspondence Framework for ALS Strip Adjustments based on Variants of the ICP Algorithm},
booktitle={PFG Photogrammetrie, Fernerkundung, Geoinformation Jahrgang 2015 Heft 4},
year={2015},
}