Classify Below Surface Points
Function Description: This function classifies points in the initial category that are below the elevation of the surrounding neighborhood. For example, when the starting category is ground, this method can be used to classify points lower than the surface elevation to be the lower-than-the-surface point.
- The main algorithm idea of this function is:
- Search for a certain number of nearest points for the current point in initial class.
- Fit the plane with the nearest point.
- Calculate the absolute value of the height difference between the current point and the plane. If the value is less than the set Z tolerance, it is not categorized. If it is greater than the tolerance, go to the next step.
- Calculate whether the difference between the current point elevation and the average value of the neighboring points is greater than the Limit of the standard deviation. If it is greater than, then it is classified as the target category; otherwise, it is not classified.
Steps
1.Click Classify Below Surface Points![]() button, pop up the Classify Below Surface Points dialog box
button, pop up the Classify Below Surface Points dialog box
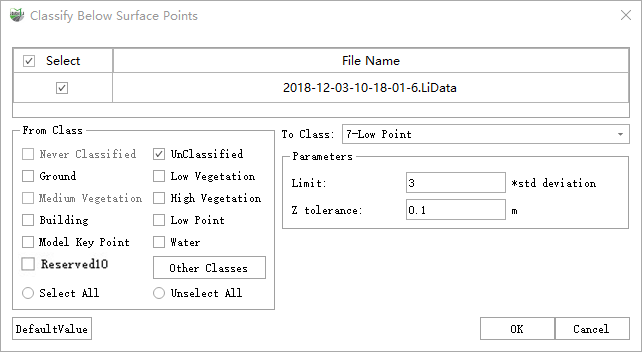
Parameter description:
- Input Data: The input file can be a single point cloud data or a point cloud dataset.
- From Class: Source class(es).
- To Class: Target class.
- Limit: The default is "3". The multiple of the mean squared error of the neighboring point fitting plane of the unclassified points. The larger the value, the less points will be classified into the target class.
- Z tolerance (meters): The default is "0.1", The threshold of height difference. The point to fit plane distance less than this value is not classified. The larger the value, the less points will be classified into target class.
- DefaultValue: Click this button to set all parameters as default.