ICP Registration
Data Preparation
1. Double-click the Registration button under the toolbox -> data management -> point cloud tools -> registration toolbox, as shown:
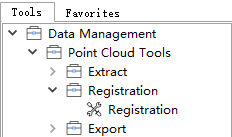
Registration Toolbox Entry
Double-clicking enters the data preparation interface for registration, as shown:
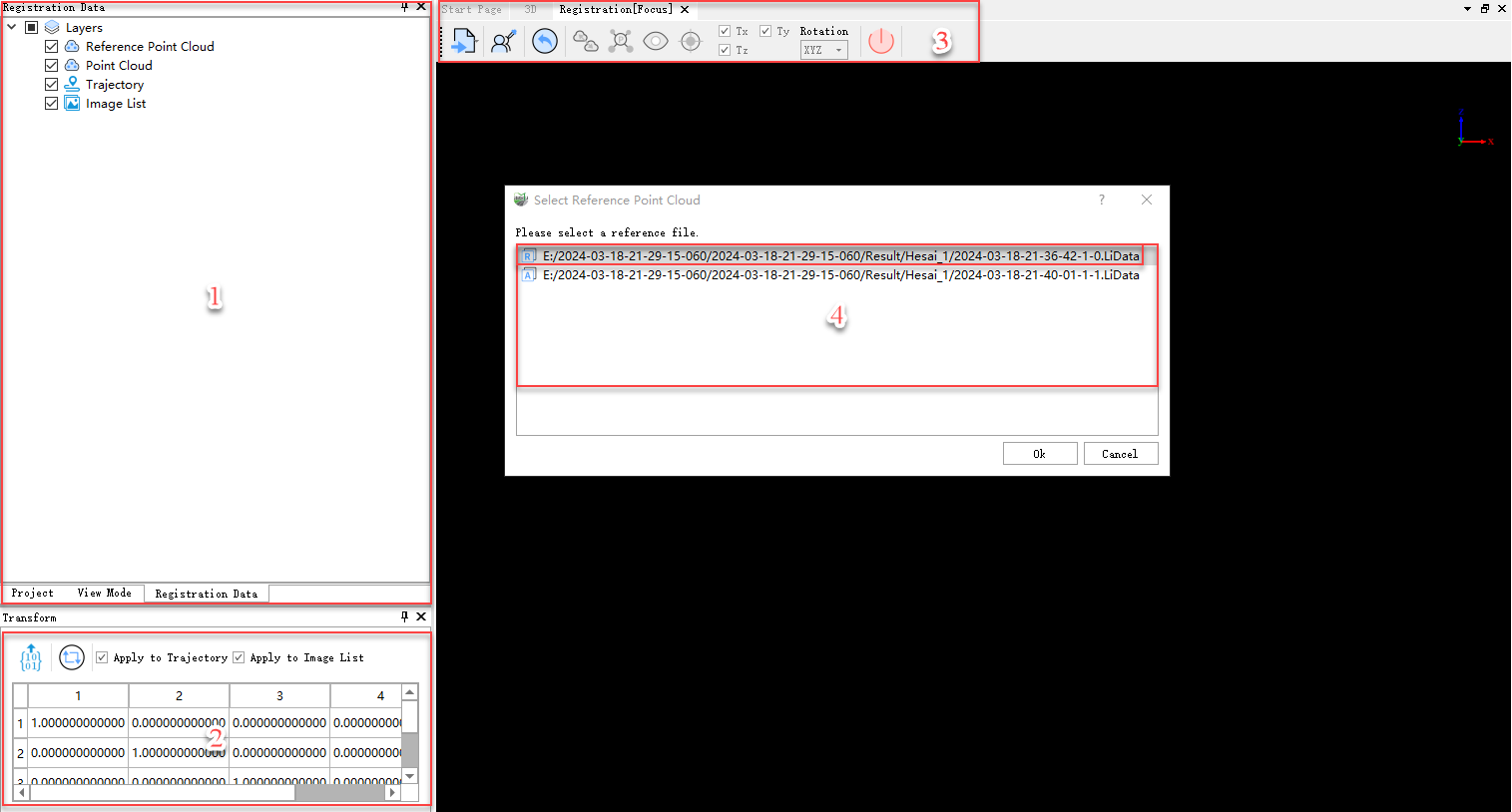
Preparation of Registration Data
- After entering the registration function, the program automatically creates a registration window with a toolbar for loading registration data and performing registration-related operations, as indicated by number 3 in the above image.
- The data loaded into the registration window is displayed in a newly created directory tree, as indicated by number 1 in the above image. Similar to the main directory tree, it also supports zooming to layers, deletion, and other right-click tools.
- In the lower left corner of the interface, there will be a point cloud transformation matrix window that displays the transformation matrix of the transformed point cloud relative to its initial position, as indicated by number 2 in the above image.
- There will also be a window showing the choice of point cloud to be registered and reference point cloud, as indicated by number 4 in the above image. All point clouds displayed in the 3D window are selectable as point clouds to be registered by default. If you need to set one of the point clouds as a reference point cloud, click on the label of that point cloud. After clicking, the icon in front of the point cloud label will change from A to R. Similarly, if you want to set the reference point cloud as a point cloud to be registered, click on the label of that point cloud.
After selecting the reference point cloud and point cloud to be registered, click OK. The point cloud to be registered and the reference point cloud will be loaded into the registration window, and by default, the trajectory and exposure point images in the 3D window will be loaded into the registration window for display. As shown:
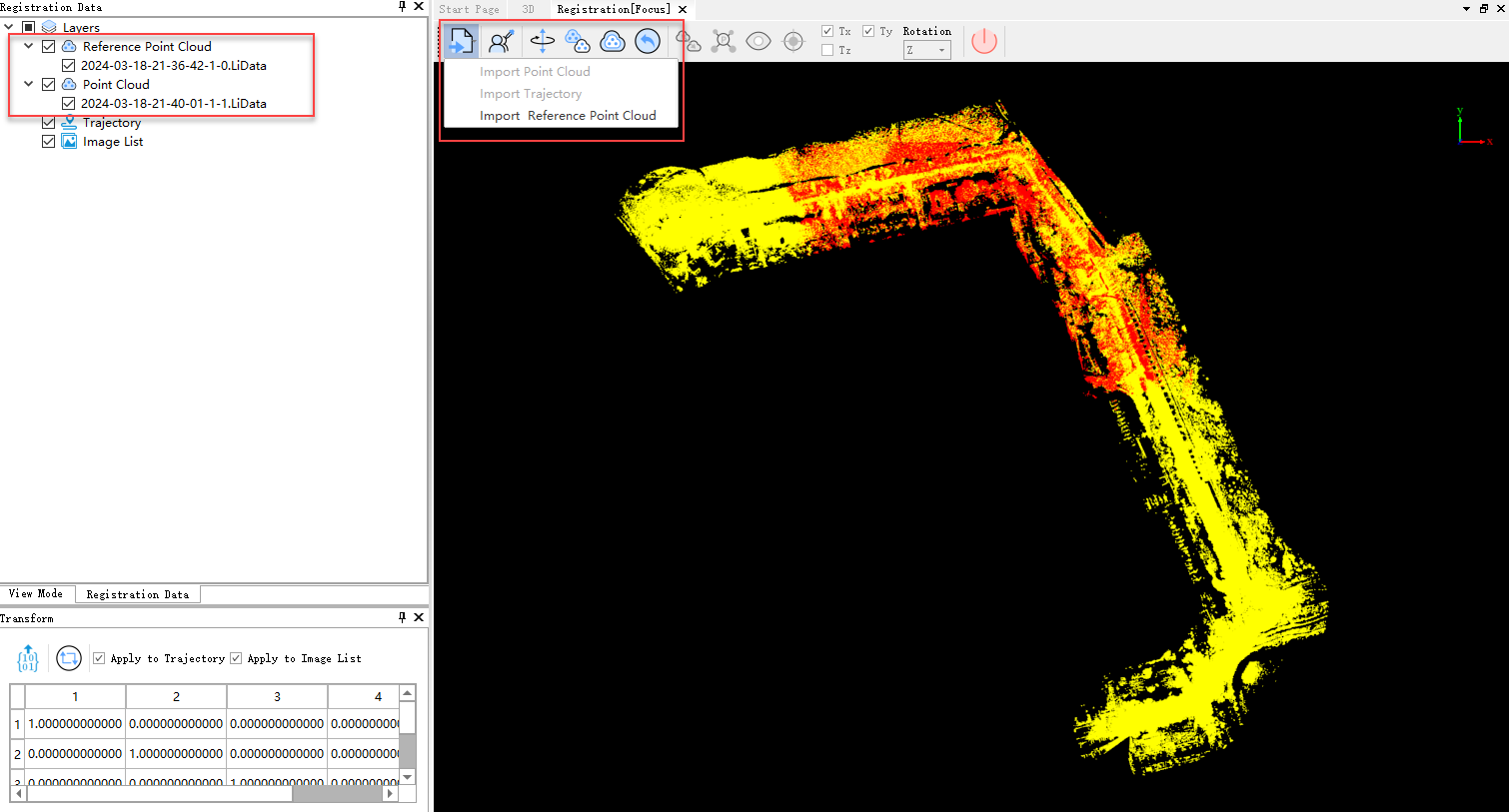
Display of Registration Data
The point cloud to be registered is displayed in red by default, and the reference point cloud is displayed in yellow. You can also choose to load a new reference point cloud using the Import Reference Point Cloud tool in the toolbar.
If you want to change the default color display, click the Display by Role button to select the display colors for the reference point cloud and the point cloud to be registered, as shown:
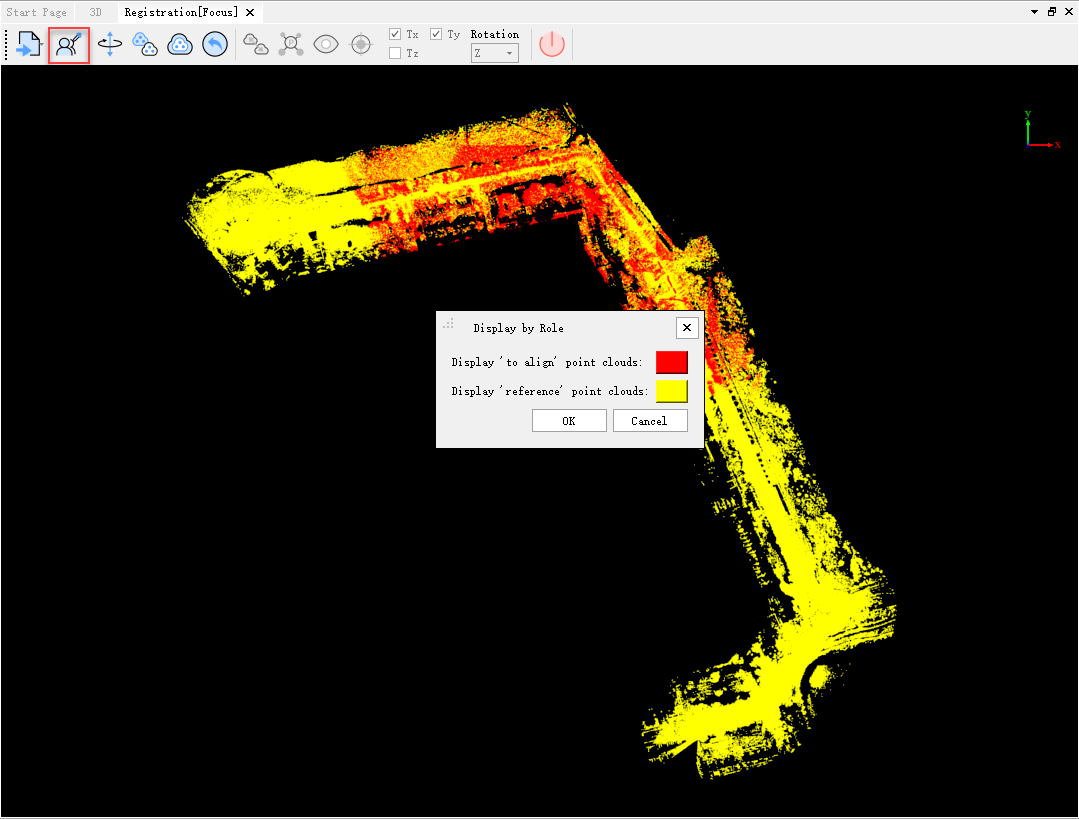
Display by Role
ICP
1. After performing a coarse registration of the point clouds, click the Iterative Closest Point ![]() button in the registration page to bring up the ICP registration window.
button in the registration page to bring up the ICP registration window.
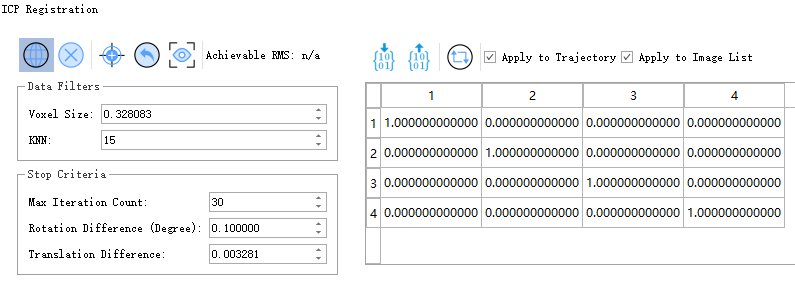
ICP Function Interface
2. In the ICP registration window, click the spherical selection tool ![]() and select the common area of the two point clouds in the point cloud window. You can select different regions multiple times. If there is an incorrect selection, you can press Ctrl+Z to undo or click
and select the common area of the two point clouds in the point cloud window. You can select different regions multiple times. If there is an incorrect selection, you can press Ctrl+Z to undo or click ![]() to cancel all selections and start over.
to cancel all selections and start over.
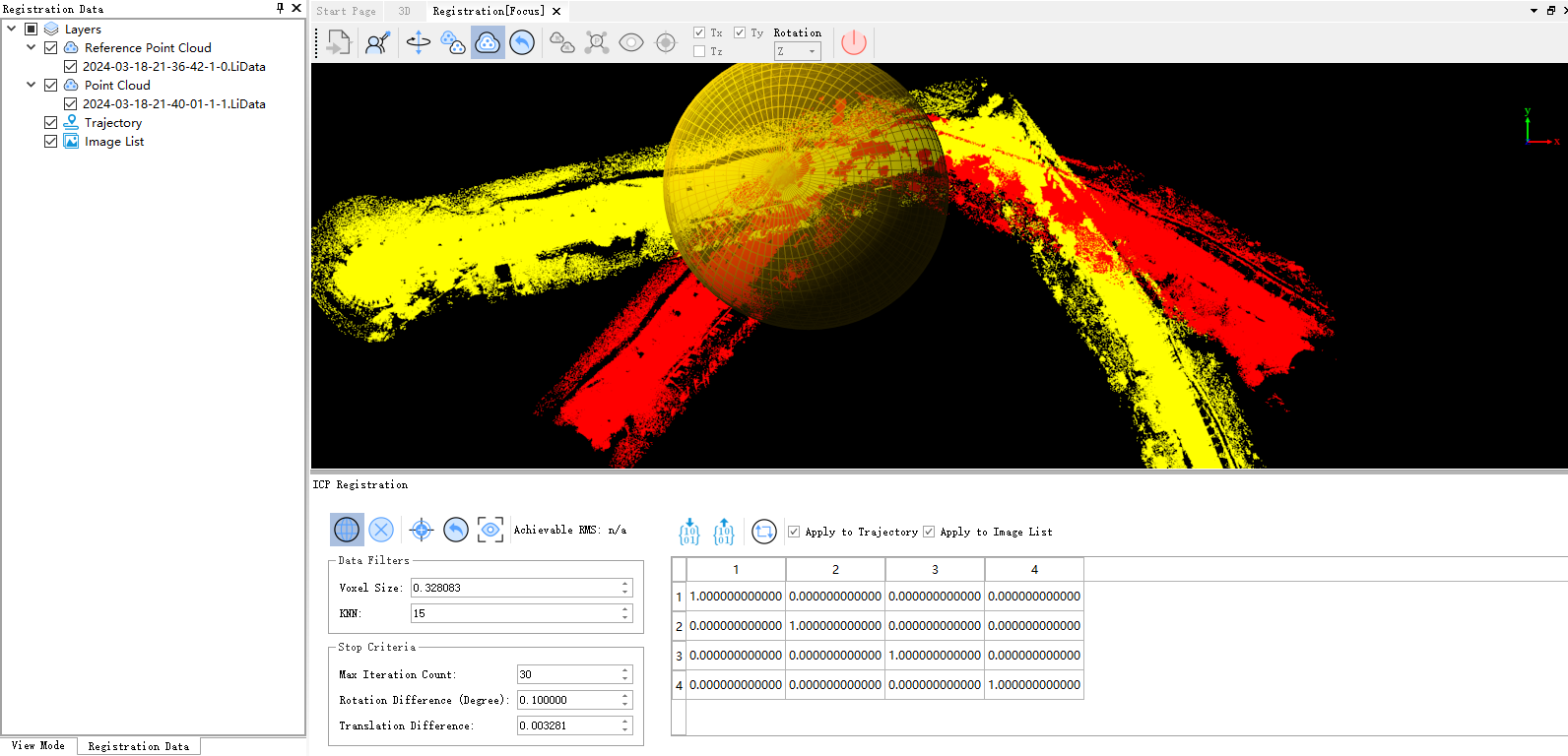
ICP Function Interface
3. After completing the selection, click the ![]() button to perform ICP registration.
button to perform ICP registration.
4. Click the ![]() button to preview the registration results.
button to preview the registration results.
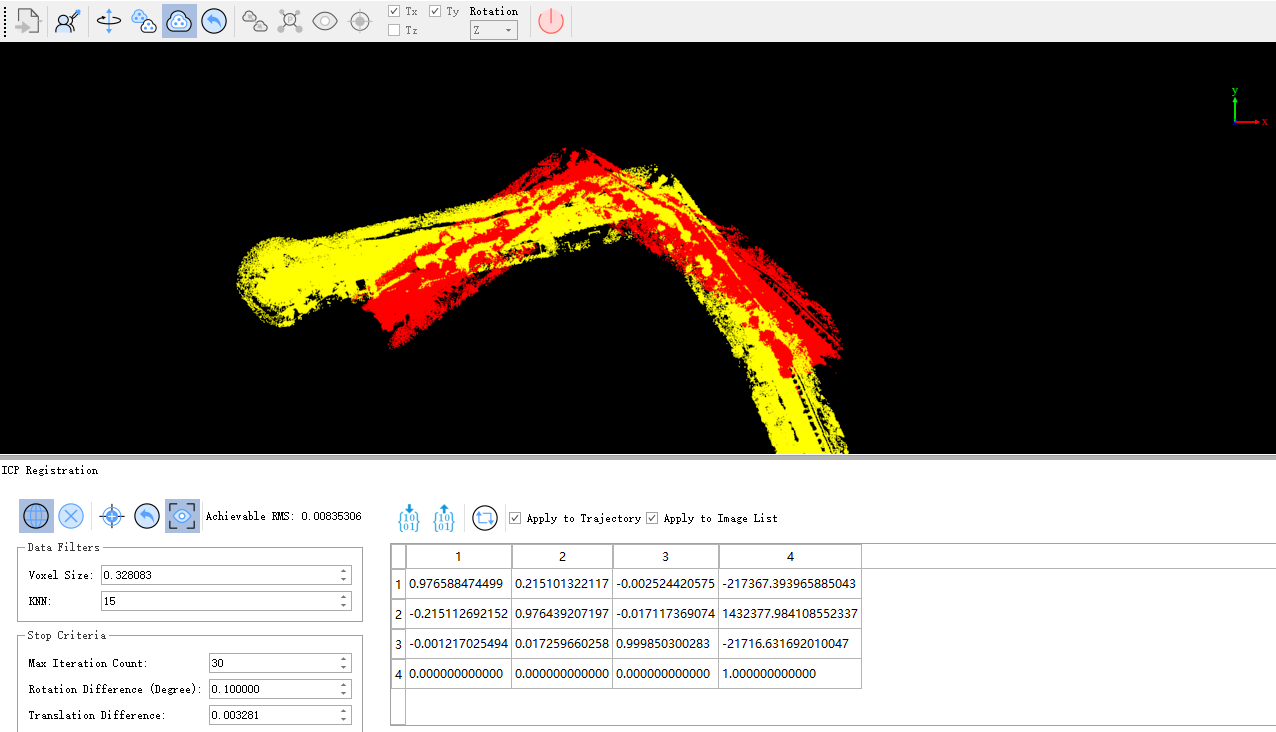
Preview
5. If you are not satisfied with the registration results, you can first click the ![]() button to close the preview, then repeat steps 2 to 4 to re-perform ICP registration.
button to close the preview, then repeat steps 2 to 4 to re-perform ICP registration.
6. If you confirm that the registration results are satisfactory, click the ![]() button to transform the point cloud. In the pop-up window, if you choose "Yes," the existing project file and the point cloud file to be registered will be overwritten. If you choose "No," a new project file and a registered point cloud file will be created.
button to transform the point cloud. In the pop-up window, if you choose "Yes," the existing project file and the point cloud file to be registered will be overwritten. If you choose "No," a new project file and a registered point cloud file will be created.
7. If you choose "No," after the transformation is complete, the software will prompt you to open the new project. Click OK. Reload the reference point cloud, and the final registration effect is as shown below.
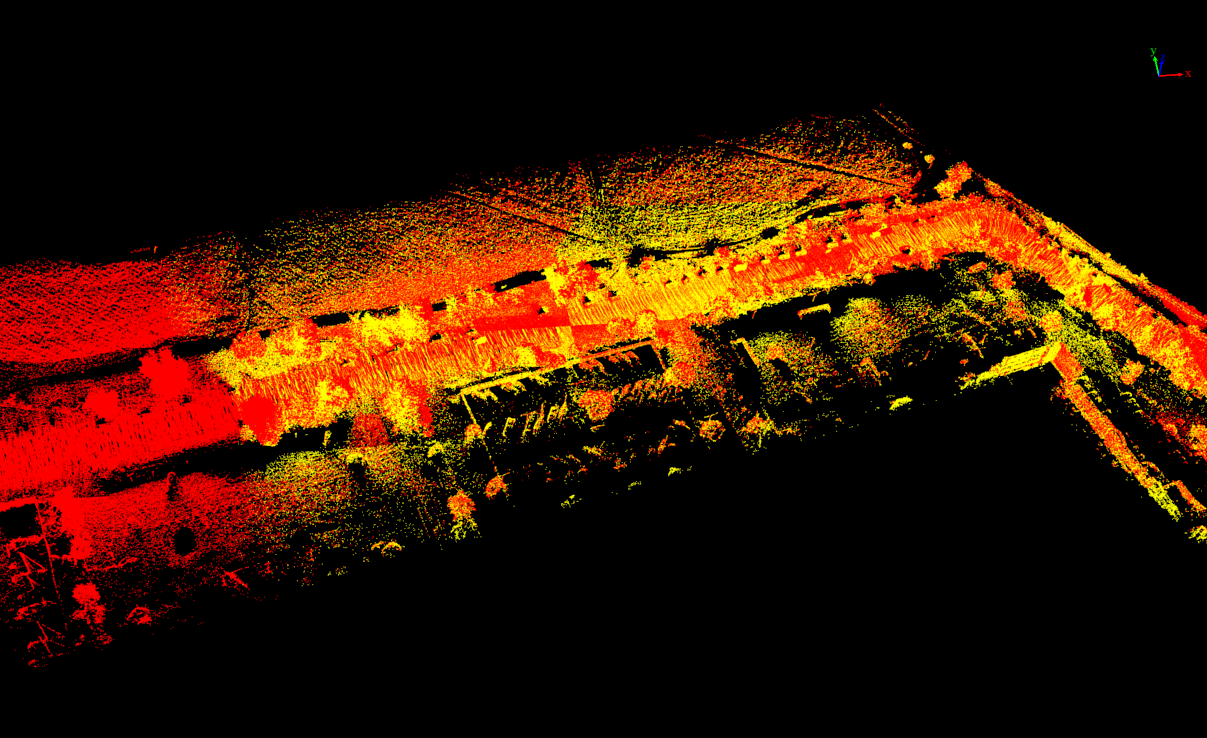
ICP Results