Point Cloud Subdivision
Function Description: LiDAR360MLS uses scale-based point cloud segmentation, and can perform point cloud data subdivision without loading the trajectory file, and automatically segment the point cloud according to the set scale, to provide users with a fast and efficient means of data collaborative processing.
Steps
1.Click Point Cloud Subdivision![]() button and the following interface will appear.
button and the following interface will appear.
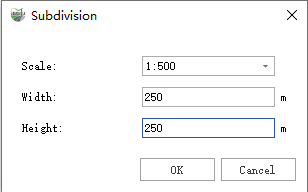
Parameter Description
- Scale: The precision can be selected as 1:500, 1:1000, 1:2000, 1:5000.
- Width: Controls the width of the frame.
- Height: Controls the height of the frame.
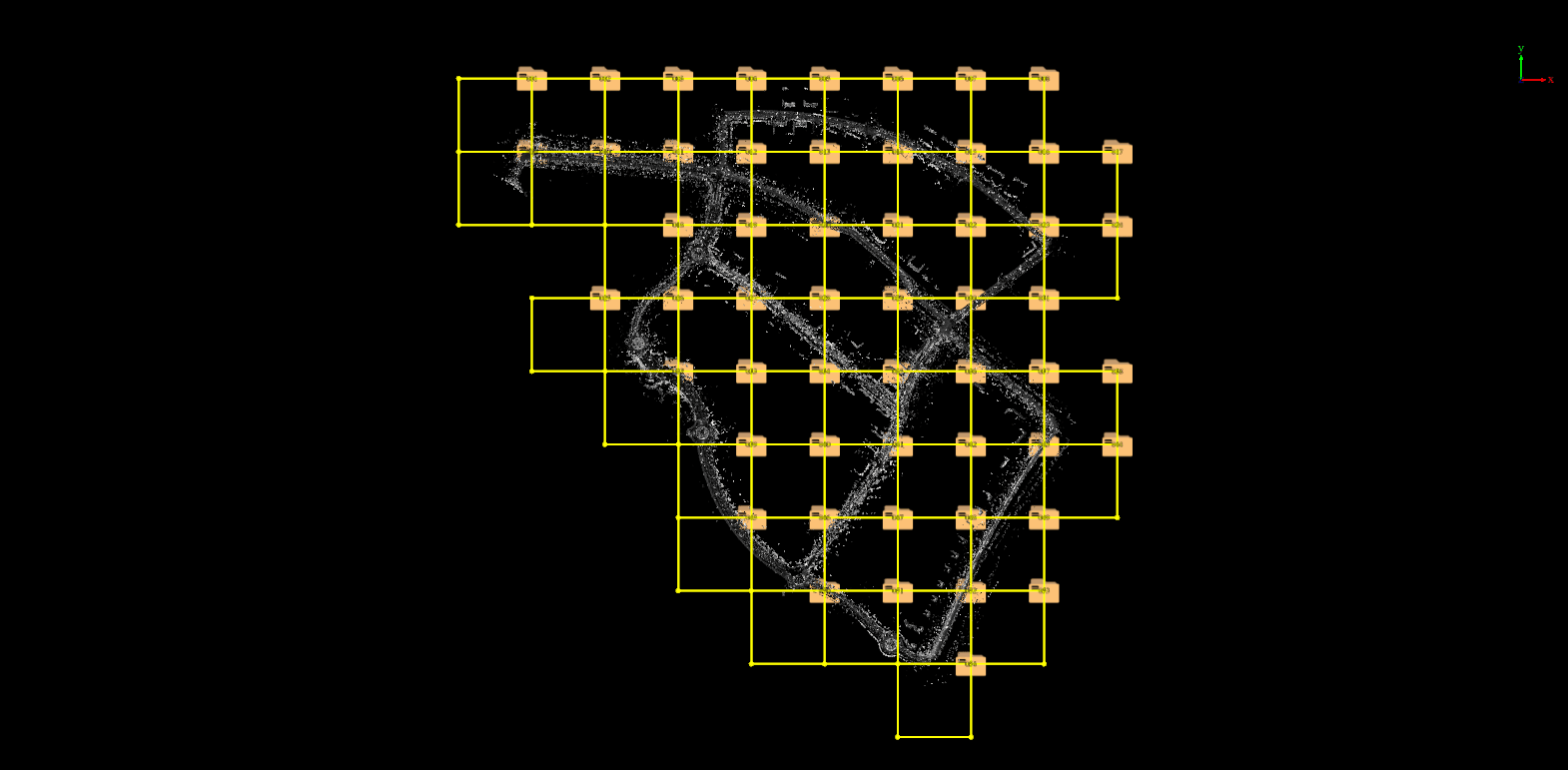
2.After clicking the OK button, the result of the framing is shown in the following figure: