Register
Link
Link generated by Strip Adjust is the core concept in Register and is also an important object for operation. The principle of registration is to segment the trajectory, and then match and revisit the trajectory segment to form a matching pair. Track segments are associated to point clouds, and a set of matching pairs will associate two point clouds. After completing the registration between all matching pairs and associated point clouds, global splicing can be realized. The matching pair is called a Link. Therefore, the quality of the "Link" has a direct impact on the accuracy of the final splicing. The job of Register is to improve the quality of the "Link", and there are three specific cases.
Low-quality Links: Most problem links fall into this type, mainly due to the large initial location layering of the point cloud or the lack of scene geometry features, which causes the point cloud to be registered correctly. The RMSE value of this link is too large and the leverity is not good. Manual registration should be performed to improve the accuracy of point cloud registration.
Redundant Links: Due to the complexity of the actual scenario, the links construction algorithm sometimes produces redundant links. For example, near a highway ramp, redundant links may be generated between the main lane and the ramp. In fact, the overlap of the point clouds in the two places is low, which can easily lead to registration errors. Therefore, if there are redundant links, we should delete manually.
Missing Links: This type of link is less likely to occur and usually occurs in areas with a high number of revisits, such as intersections. Some of the trajectory segments are not properly connected to each other and should be added manually.
Steps
1.Before registration, you must run the Strip Adjust, otherwise the Register![]() is unavailable. Therefore, check the stations that need to be matched first.
is unavailable. Therefore, check the stations that need to be matched first.
2.Check Strip Adjust![]() . Click Start
. Click Start![]() button and run.
button and run.
3.After the Strip Adjust is successful, the checked station will automatically be set into a "Group" and set to the current activation by default. "Group" is the unit of Register. At this point, Register becomes available.
4.There are two ways to activate the Registration window (which is docked on the right side of the main window by default).
First, by checking Register
 to activate it. Note that the Registration process checkbox is hidden by default and can be displayed by checking Register under the Display section on the Geo Process page.
to activate it. Note that the Registration process checkbox is hidden by default and can be displayed by checking Register under the Display section on the Geo Process page. Second, right-click on the currently active group in the directory tree and select Register
to enter. 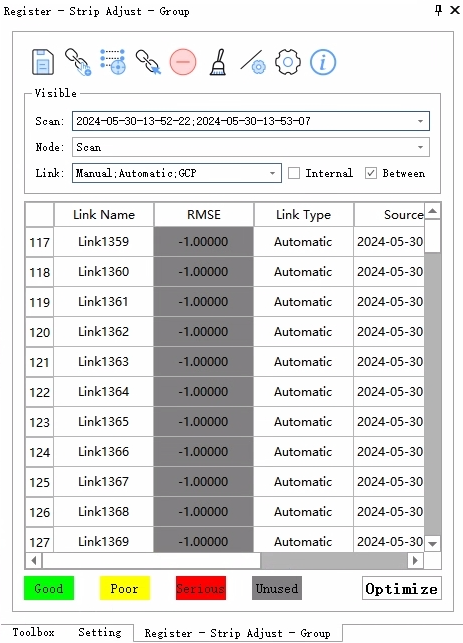
MLS Register
5.Start by looking at the link attribute table. Click the "RMSE" header to sort, view the links with non-optimal quality level one by one, and manually stitch to improve the registration accuracy of point clouds.
6.Look at the point cloud unmatched to see if there are "redundant links" or "missing links". Delete redundant links and complete missing links.
7.There are two ways to run Register.
Directly click the Optimize button.
Only check Register
and click Start button.
button.
8.After the Register is complete, skip to step 5 to continue analyzing the quality of the optimization results until there is no stratification in the point cloud.
Register Window
The registration window consists of a toolbar, visibiliby controller of data, link attribute table, and a quality level legend, which are described below.
1.Toolbar
Integrate operations such as editing, manual registration, automatic links, etc.

Register Toolbar
Save Links: Save the links in the current link table.
Add Link: You can add the link of the trajectory segment inside the station and the link between the stations. Click on the two track segments successively to complete the link, and the direction is the first to the second.
Munal Registration: This is used to active muanl registration window. Pick one link by Pick Link or click one link in Link Attribute Table, and click this button. For specific operations, see Manual Registration.
Pick Link: Pick links in 3D viewer. The record of link in Link Attribute Table will be selected and skipped at the same time.
Delete Links: Delete the selected links(The GCP link can not be deleted).
Clear All: Clear all links(Exclude GCP links).
Auto Link: Clear and rebuild all links.
Settings: To set parameters of Register including the order of scans in the active group、 designating source scan and target scan.
Information: To show the complete legend of link's quality level.

Information
2.Data Visible
To control the visibility of "Node" and "Link" in 3D viewer. It can be controlled from five dimensions: station, nodes, links, internal, and external.

Node(Red Point)、Link(Grey Line)
Scan: List all scan names in the active group. It is effective for the visibility control of node and links.
Node: To control the visibility of nodes. The "Scan" represents the point cloud, trajectory, imglist basic data. The trajectory segments show as red circle points in 3D viewer. In particular, the basic data control is jointly controlled by the engineering directory tree and the survey station, and the directory tree is the first priority. Specifically:
If the base data is checked in directory tree, Scan will control the visibility directly.
If the base data is unchecked in directory tree, it will always be hidden
Link: To control the visibility of "Link". "Munal" represents the links added munually. "Automactic" represents the links generated by program automaticlly. "GCP" represents the GCP link added in GCP Edit.
Internal、Between: To control the visibility of links. "Internal" represents the links in one scan. "Between" represents the links between two scans.
3.Link Attribute Table
List all links in program and show the name、RMSE、link type、source and target. In addition, Delete Links and Munal Registration are also placed in the context menu.
RMSE: The registration error of the matching pair. A greater than or equal to 0 means valid link, and less than 0 means that the link is unused, usually because there is no corresponding point cloud.
Link Type: There are three types: automatic, manual, and GCP. Among them, automatic and manual links support deletion and manual registration, but GCP links are not.
Source: The name of the source scan.
Target: The name of the target scan.
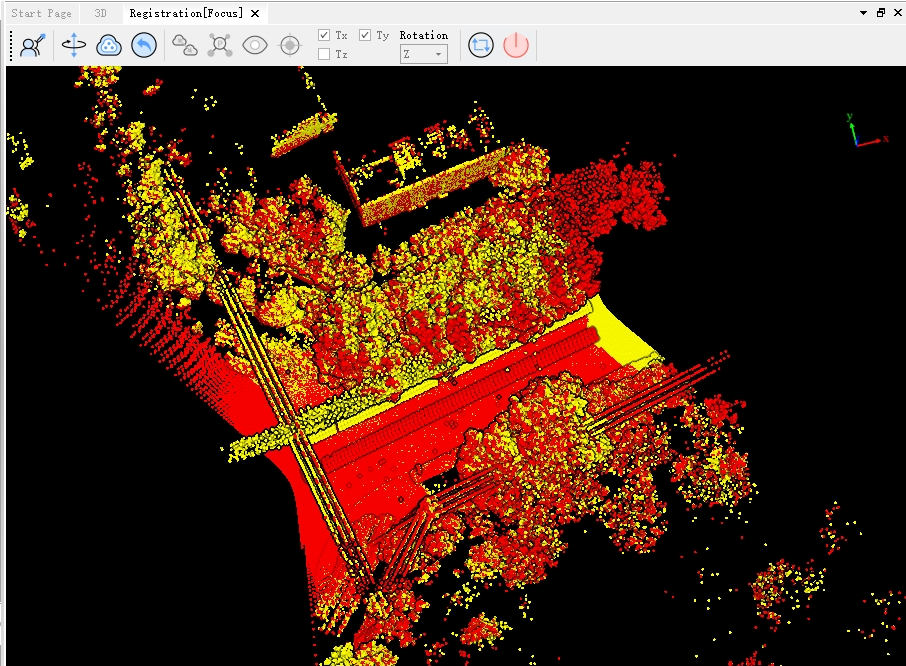
It consists of three parts: registration data directory tree, transformation table, and toolbar, which are introduced separately below.
Registration Data: By default, it is located on the left side of the main window and is used to control the display and hiding of registration point clouds and reference point clouds.
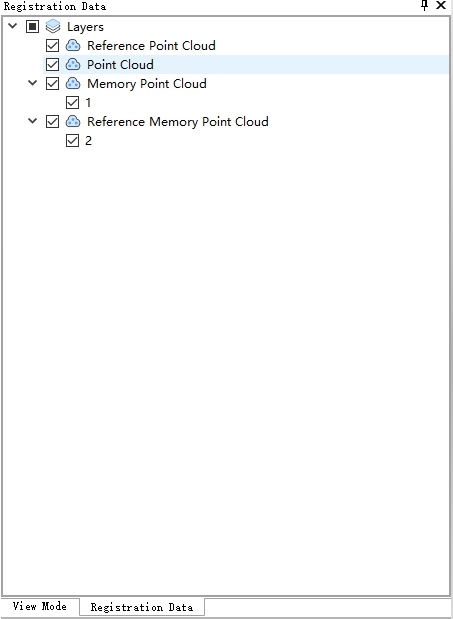
Registration Data
Transform: By default, it is located at the bottom left of the main window. It is initially the initial transformation matrix of the registration pair and is updated following the manual registration operation.
Transform
Toolbar: Integrated functions of manual stitching and point cloud interaction.
Toolbar
Display by Role: Used to set the color of registration point cloud and reference point cloud.
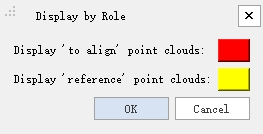
Display by Role
Memory Point Cloud R/T: Perform rotation and translation operations on the registered point cloud for rough registration.
- Tx: Check to enable X-direction translation.
- Ty: Check to enable Y-direction translation.
- Tz: Check to enable Z-direction translation.
- Rotation: Set the active axis of rotation. For example, selecting Z means turning on rotation around the Z axis.
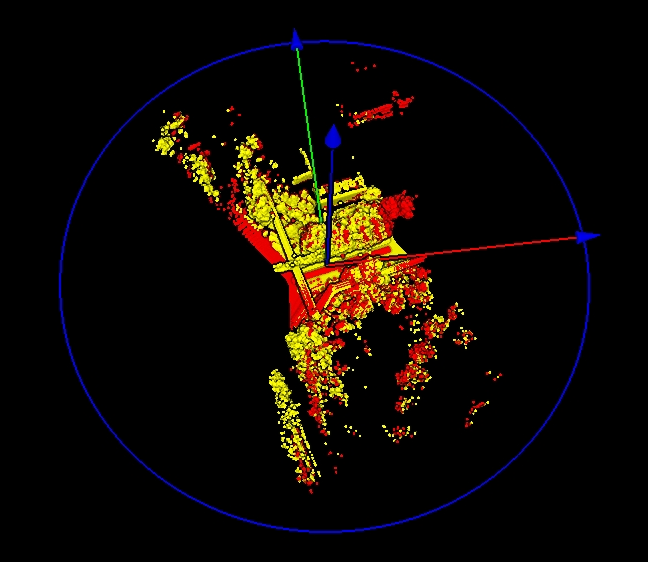
Memory Point Cloud R/T
Iterative Closest Point: After rough registration, the registration point cloud and the reference point cloud have roughly overlapped. ICP is used for fine registration to further improve the registration accuracy.
Restore: Set the transformation matrix to the unit matrix, and the point cloud position will be restored to its initial state.
Select Match Center: Manually specify the matching center point of the registration point cloud and reference point cloud in sequence.
View: After activation, the view enables drag-and-drop browsing and disables point cloud rotation and translation.
Rotate Center: Specifies the center point of the point cloud rotation operation circle.
Apply: After coarse registration and fine registration are completed, click Apply, the registration window will automatically close, and the link's registration matrix and RMSE will be updated.
Exit: If you are not satisfied with this registration, click Exit, the registration window will automatically close, the registration result will be discarded, and the link's registration matrix and RMSE will remain unchanged.
5.Quality Level Legend
The quality grade is determined by the RMSE of link and is divided into four grades: Good, Poor, Serious, Unused. is indicated by different colors. For the level rating, see the Information button.