Create Transformation Relationship
1ppm = 0.001‰ is defined as one part per million (1 PPM)
Supported conversion relationship:
- Four parameters:
- Translation parameter Dx (meter, default value: 0).
- Translation parameter Dy (meter, default value: 0).
- Rotation parameter Theta (second, default value: 0).
- Zoom ratio t (default value: 1.0).
- Elevation fitting: You can check whether to carry out elevation fitting. If elevation fitting is checked, you need to select predefined elevation fitting parameters from the drop-down list.
Note: When converting with Dx -0, Dy -0, Theta = 0, t = 1.0, the original paint cloud will be obtained.
The four-parameter formula can be written as follows:
It can be solved according to the following formula:
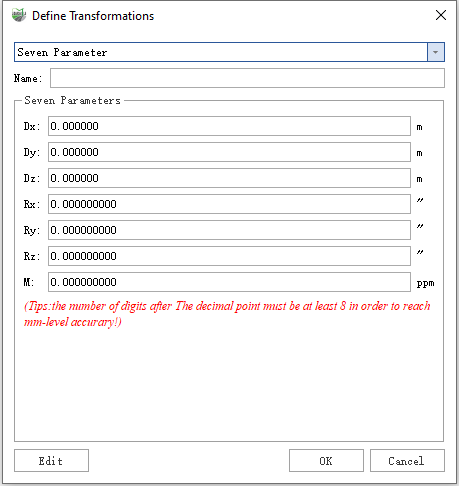
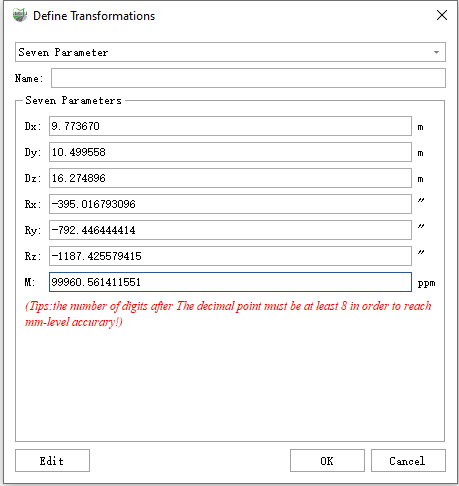
- Seven parameters: The seven parameters in the Bursa model.
- Translation parameter Dx (meter, default value: 0).
- Translation parameter Dy (meter, default value: 0).
- Translation parameter Dz (meter, default value: 0).
- Rotation parameter Rx (meter, default value: 0).
- Rotation parameter Ry (meter, default value: 0).
- Rotation parameter Rz (meter, default value: 0).
- Zoom ratio m (ppm).
Note: The scale m in the seven parameters is different from the scale t in the four parameters. The two can be transformed into each other. The conversion relationship is m = (t - 1.0) 1e6. Assuming t is 0.9999988, then m = (0.9999988-1.0) 1e6 = -1.2.
The formula of Bursa's seven parameters can be written as follows:
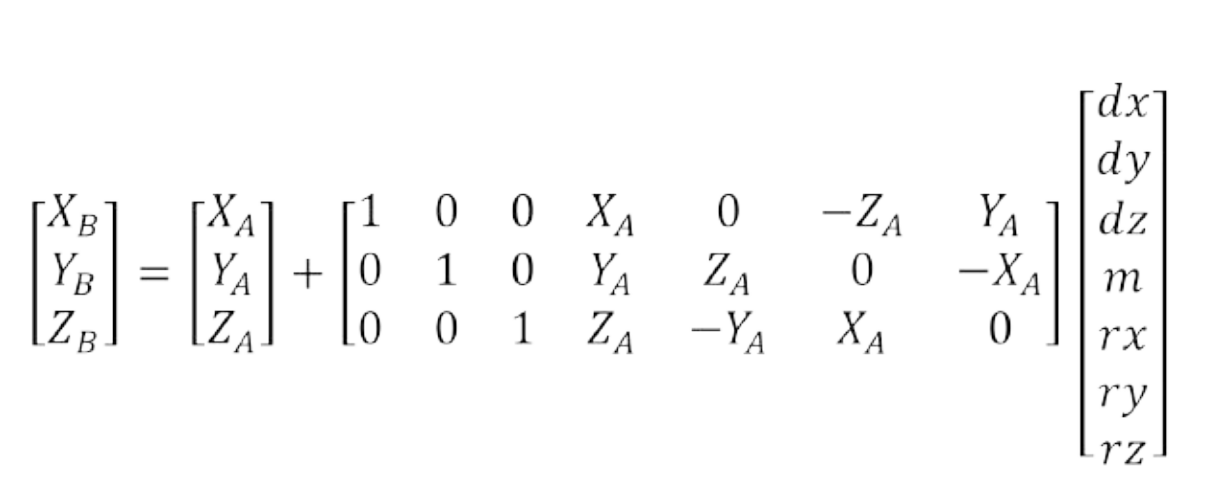
The seven-parameter model can be converted into 3D affine transformation parameters, and the conversion relationship is:
Dx = Dx;
Dy = Dy;
Dz = Dz;
Rx(″) = Rx(″);
Rx(″) = Rx(″);
Rx(″) = Rx(″);
Mx(ppm) = m(ppm);
My(ppm) = m(ppm);
Mz(ppm) = m(ppm);
- 3D affine transformation:
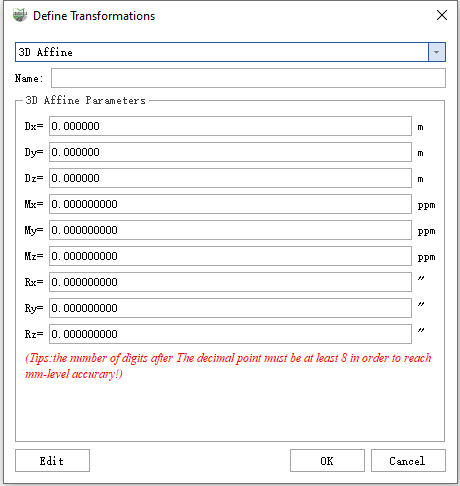
- Dx, Dy, Dz (m, default value is "0"): Values (panning values) added to X, Y, Z.
- Mx, My, Mz (ppm, default value is "0"): Scale factors applied to X, Y, and Z. It has the same definition as the scale factor m in the seven parameters.
- Rx, Ry, Rz (second, default value is "0"): The angle of rotation about the X, Y, and Z axes in degrees.
Tips: the number of digits after The decimal point must be at least 8 in oder to reach mm-level accuracy.
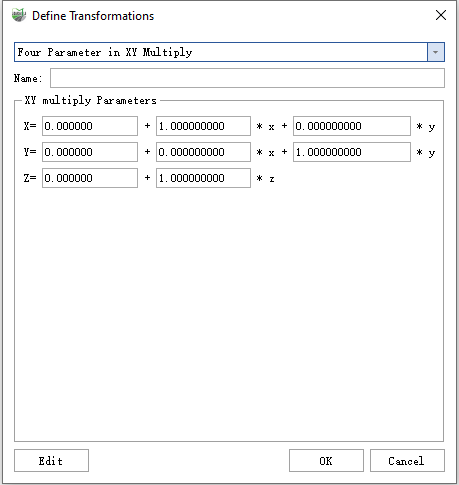
- Four parameters (displayed as two-dimensional transformation parameters): Two-dimensional transformation parameters, also known as XYMultiply.
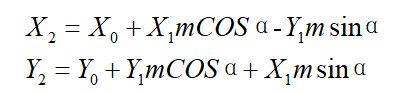
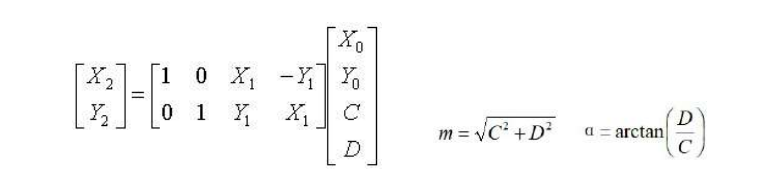
Two-dimensional transformation parameters can be expressed in the following formula:
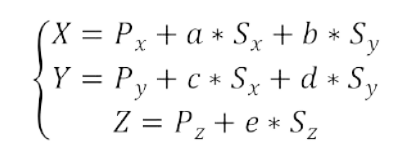
Among them, Px, Py, Pz, a, b, c, d, e are the transformation parameters, Sx, Sy, Sz are the original coordinates, and X, Y, Z are the transformed coordinates. This is often used as a 2D Helmert transformation. The parameters can be converted from four parameters. Assuming that the four parameters are: Dx, Dy, theta, t, the conversion method is:
Px = Dx;
Px = Dy;
Pz = 0.0;
Define k = t;
Define tRad = theta / 3600.0 / 180 * PI;
Then:
a = k * cos(tRad);
b = -k * sin(tRad);
c = k * sin(tRad);
d = k * cos(tRad);
e = 1.0;
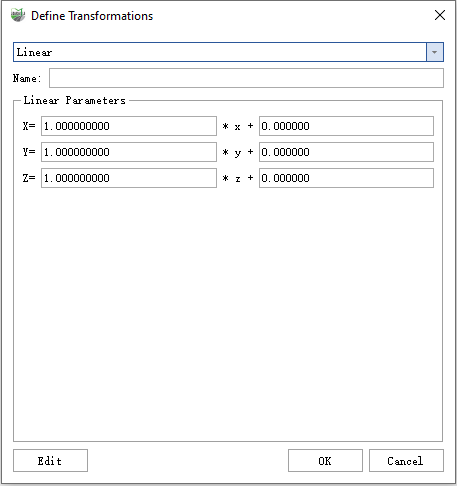
- Linear transformation: The linear transformation is used to pan and zoom a point cloud. A panning parameter and a scaling parameter need to be set to the X, Y, Z coordinates, respectively.
Linear transformation is calculated using the following formula:
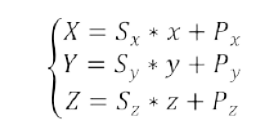
Among them: Sx, Sy. Sz are the scaling factors for the x, y, and z coordinates. Px, Py, and Pz are the panning parameters for the x, y, and z coordinates. x, y, and z are the original coordinates, and X, Y, and Z are coordinates obtained after the linear transformation.
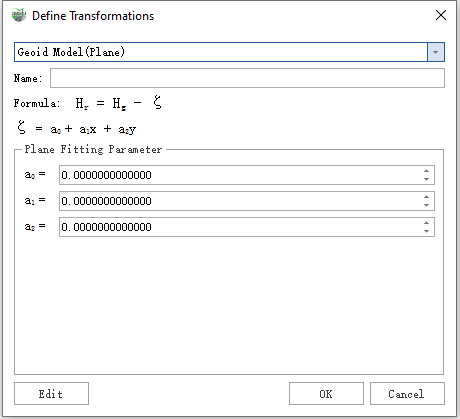
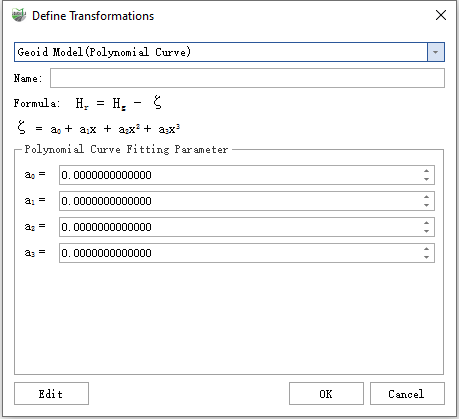
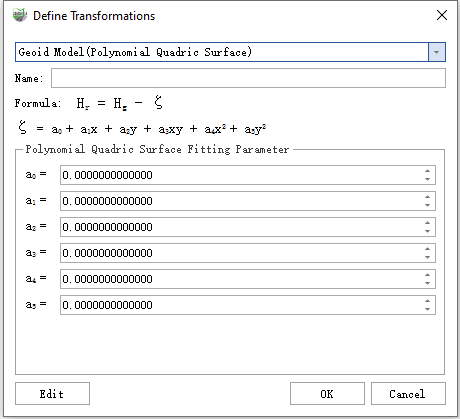
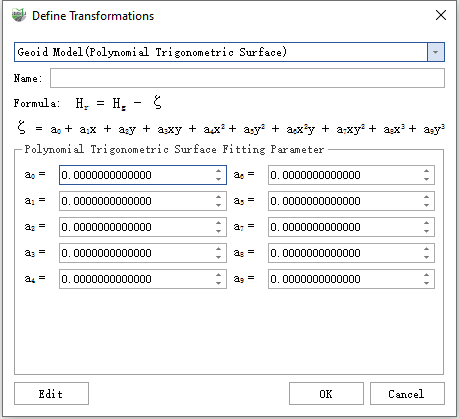
- Elevation fitting parameter: It is used to calculate elevation anomalies when xy is known, and then correct Z.
- Plane fitting. The plane fitting formula is ζ = a0 + a1x + a2y; It contains three parameters a0-a2.
- Linear interpolation. The linear interpolation formula is ζ = a0 + a1x + a2x² + a3x³; It contains four parameters a0-a3.
- Conicoid Fitting. ζ = a0 + a1x + a2y + a3xy + a4x² + a5y²; It contains six parameters a0-a5.
- The formula for the Fitting of the Cubic Bézier Curve and Surface is ζ = a0 + a1x + a2y + a3xy + a4x² + a5y² + a6x²y + a7xy² + a8x³ + a9y³; It contains ten parameters a0-a9.