Merge Data
usage scenarios
The task in the survey area requires multiple data collections, and the data needs to be seamlessly stitched together multiple times.
data requirements
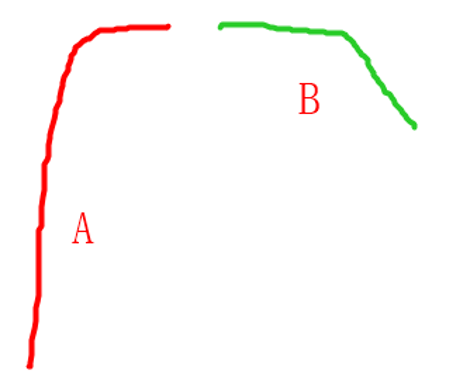
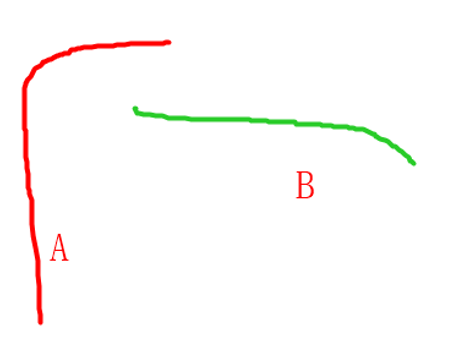
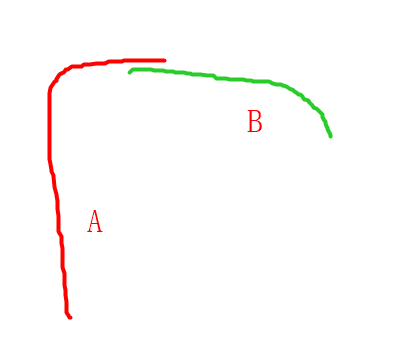
The data to be merged must have trajectory overlap, with trajectories overlapping by at least 2-5 meters and being no more than 3 meters apart; In the following three images, the first image shows no overlap, the second image shows trajectories that are too far apart, and the third image shows correct overlap.
If all processed data has absolute coordinates (including data after GCP), and the mismatch between different data is within a reasonable range, then merging may not be necessary.
group
A group is the basic unit of merging.
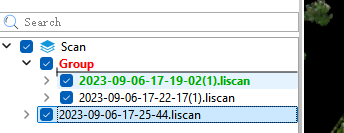
Press and hold the Ctrl key, left-click to select the data that needs to be merged together. Once confirmed, right-click 'Register'. At this point, multiple liscan will be grouped.
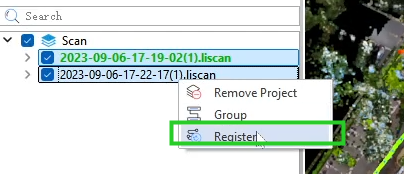
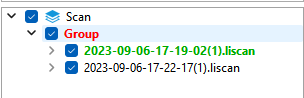
The registration interface opens (the software automatically switches the connection type to 'Between')
Merging Priority
Since merging involves the current data merging into the target data, it is necessary to determine what constitutes the current and target data.
Here, we introduce the concept of priority; the higher the priority, the more it should be considered as the target data. The order of priority is as follows:
- Those with GPS and a close-loop are the 1st priority;
- Those with GPS but without a close-loop are the 2nd priority;
- Those with GCP points and a close-loop are the 3rd priority;
- Those with GCP but without a close-loop are the 4th priority;
- Without GNSS and GCP points, this is the fifth position;
- When the levels are the same, determine the order based on area;
- If the area cannot be well determined, it can be arranged in chronological order;
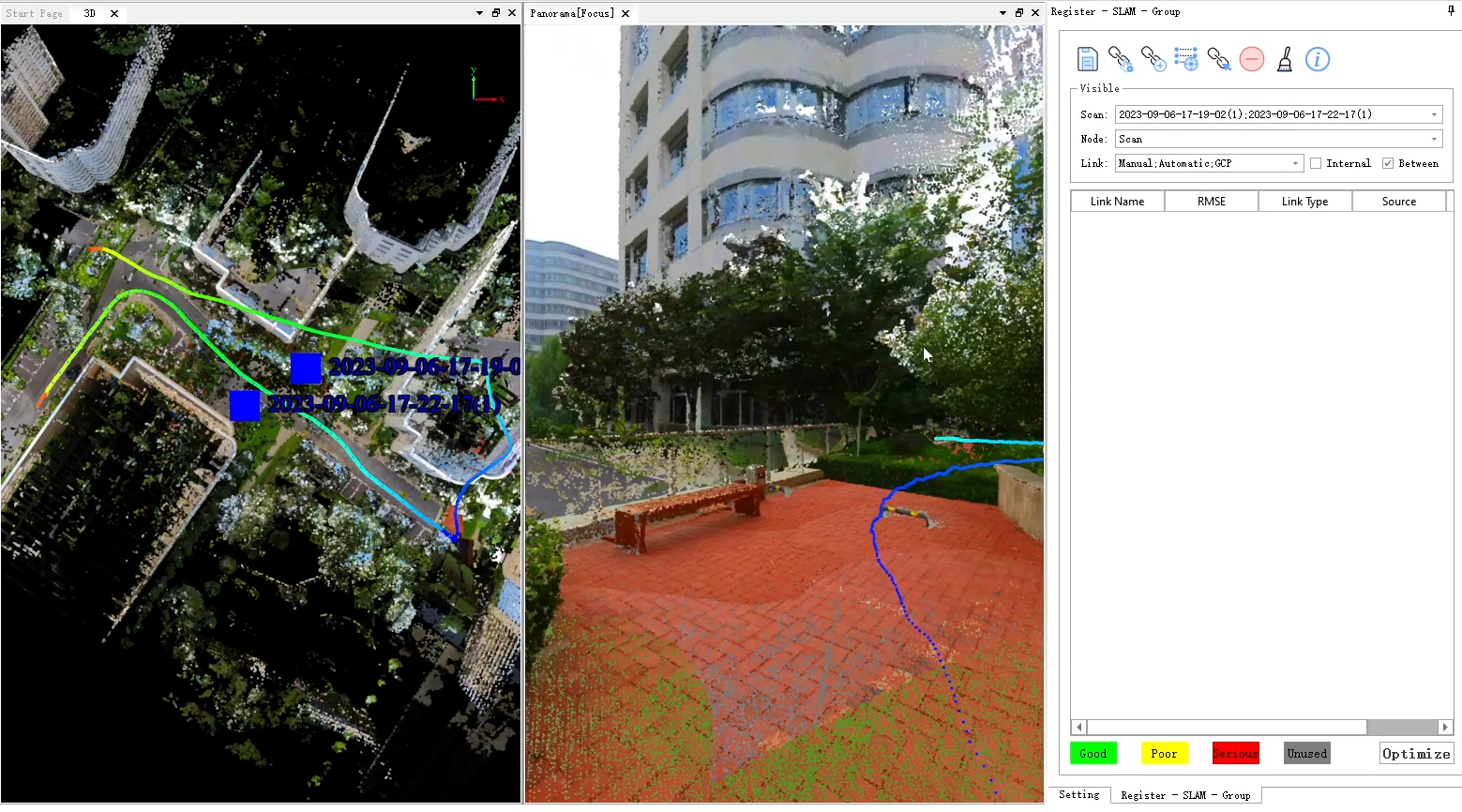
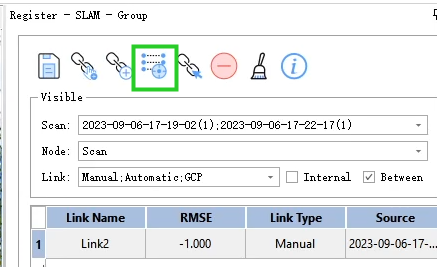
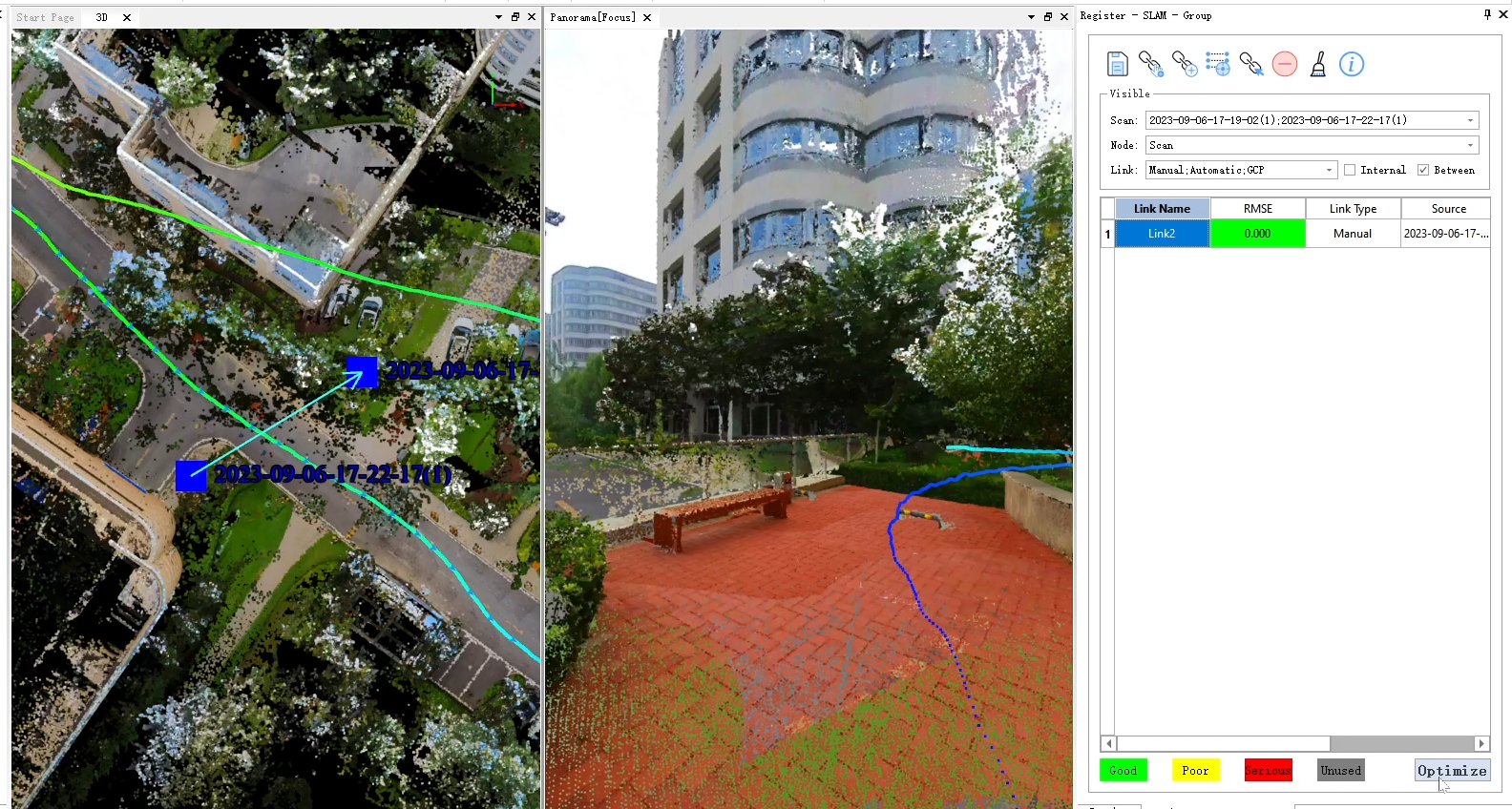
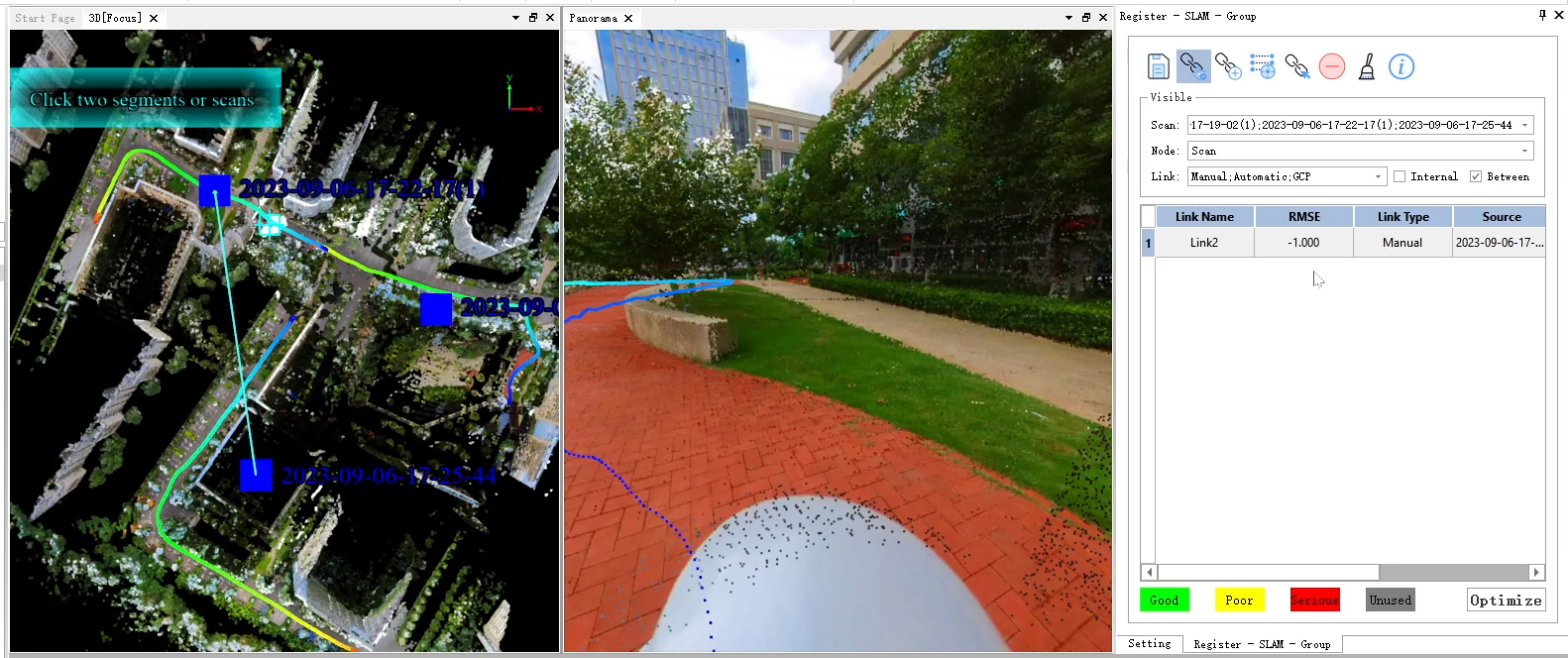
Add connection link
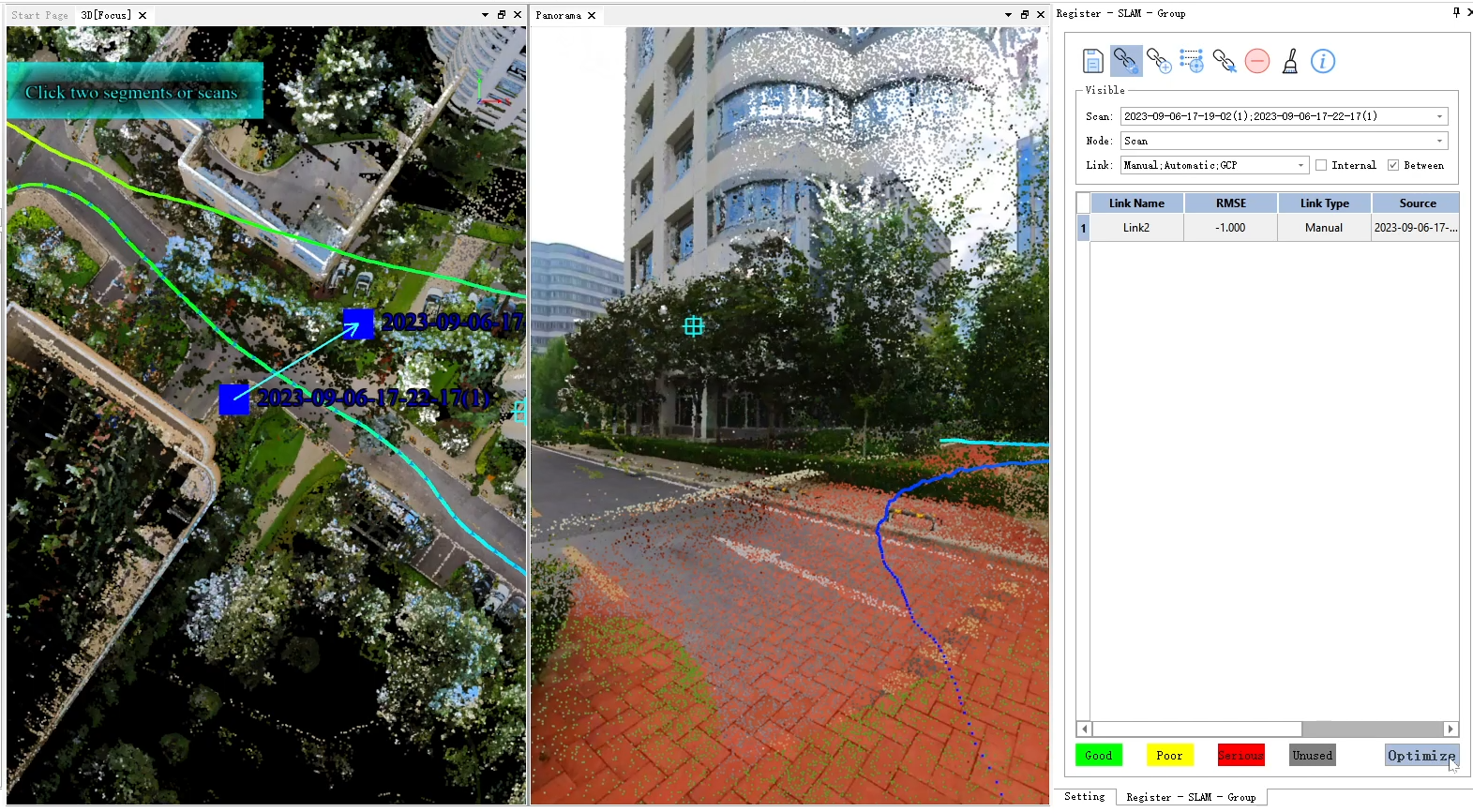
Click 'Add link' , in the 3D window, specify two sets of data for source and target (the blue font represents the name of the data).
, in the 3D window, specify two sets of data for source and target (the blue font represents the name of the data).
According to priority, the target's priority is greater than the source's priority.

Once added, a link relationship is created.
You can also directly specify the link relationship using the data name.
The linked data is the target data, and the data to be registered is the registration data.

If the data is disorganized and affects operations when adding connection relationships, you can control it by toggling the visibility of the measurement stations.
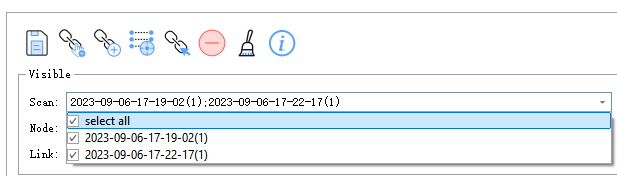
Sequentially add other link relationships.
Coarse Registration
Since the data has absolute coordinates and is basically together, there is no need for coarse registration; you can proceed directly to the next step of re-optimization.
start coarse registration
In the link list, select a link and click 'Manual merge'
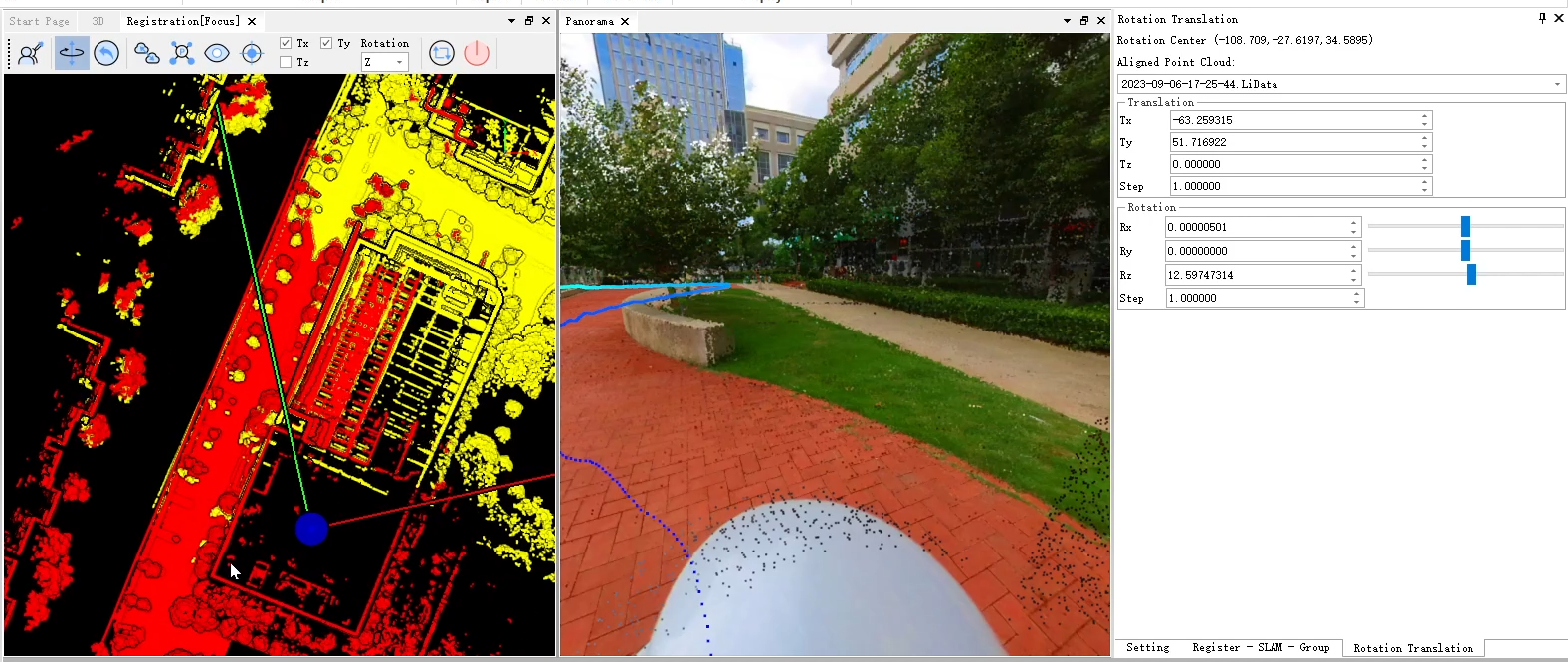
The program will automatically open the registration 3D window and display the registration and target data (in red and yellow)
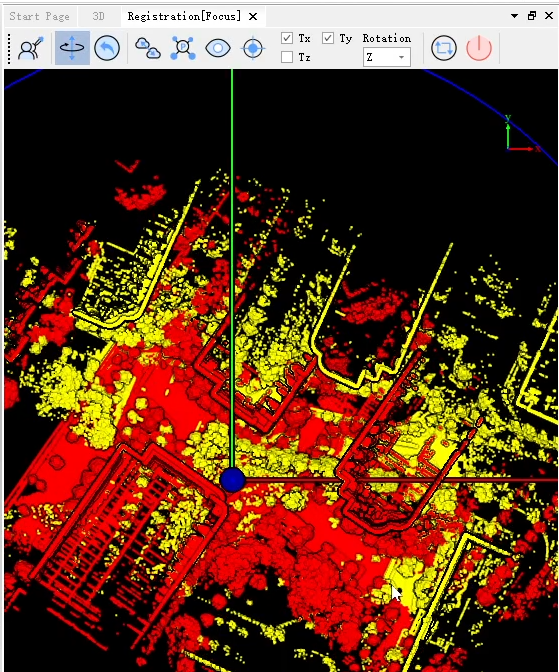
Coarse registration through rotation and translation
Click the 'Rotate and Translate' button
By selecting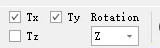 , determine the axes for rotation and translation. Use the right mouse button and left mouse button to control movement and rotation.
, determine the axes for rotation and translation. Use the right mouse button and left mouse button to control movement and rotation.
Right mouse button: Translate
Left mouse button: Rotate
During the movement and rotation process, if you need to observe the current effect, click 'Viewport' to observe.
to observe.
When the data is basically overlapping (generally, when the distance between two sets of data is within 1 meter), click 'Apply' to complete the coarse merge,and close
'Apply' to complete the coarse merge,and close the registration window.
the registration window.
In sequence, complete the coarse registration of other link.
Note: The effect of rough stitching will not be displayed in the 3D window.
Re-Optimize
Click the 'Optimize' button at the bottom right of the registration list to optimize and merge the data.
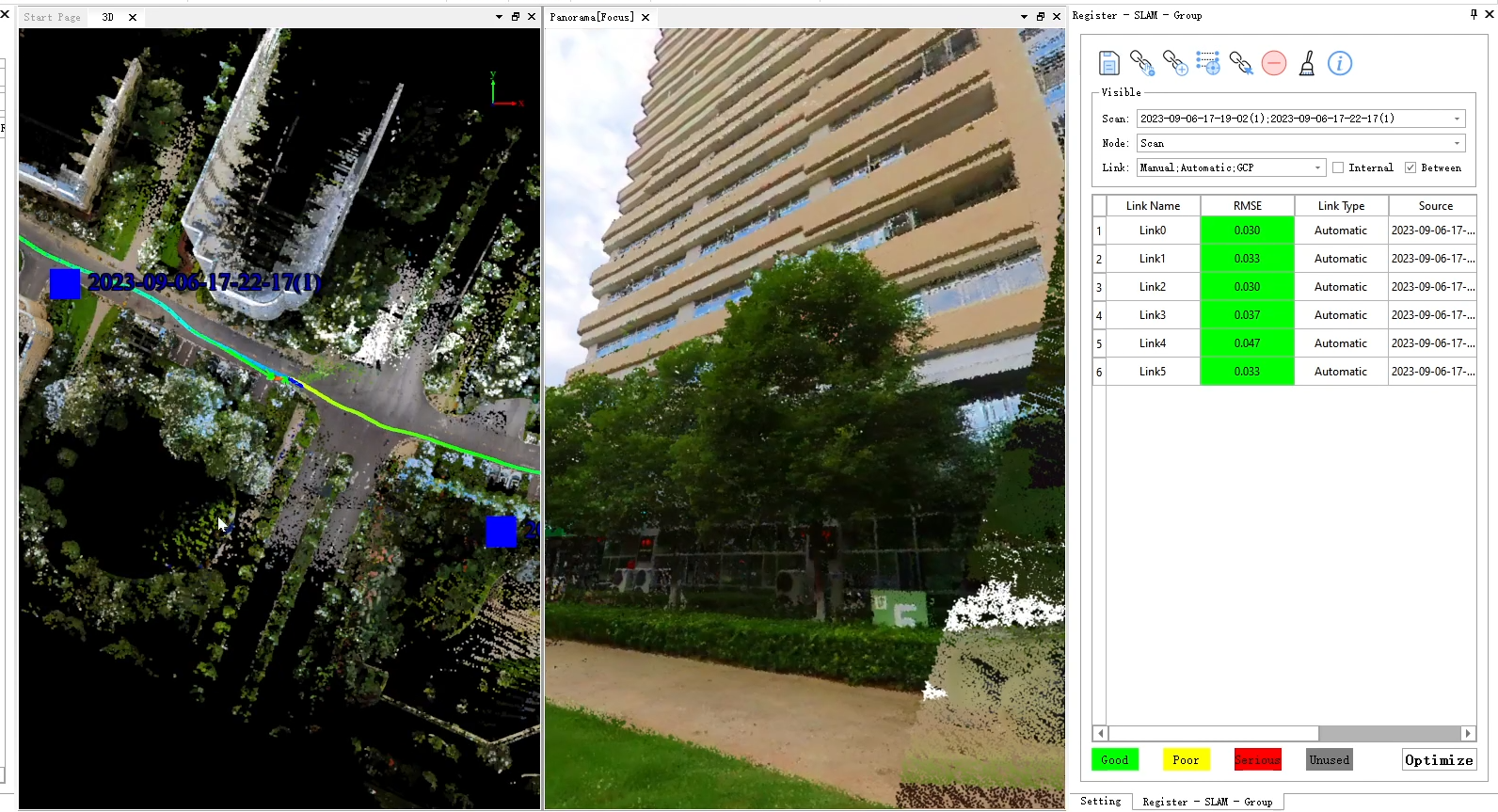
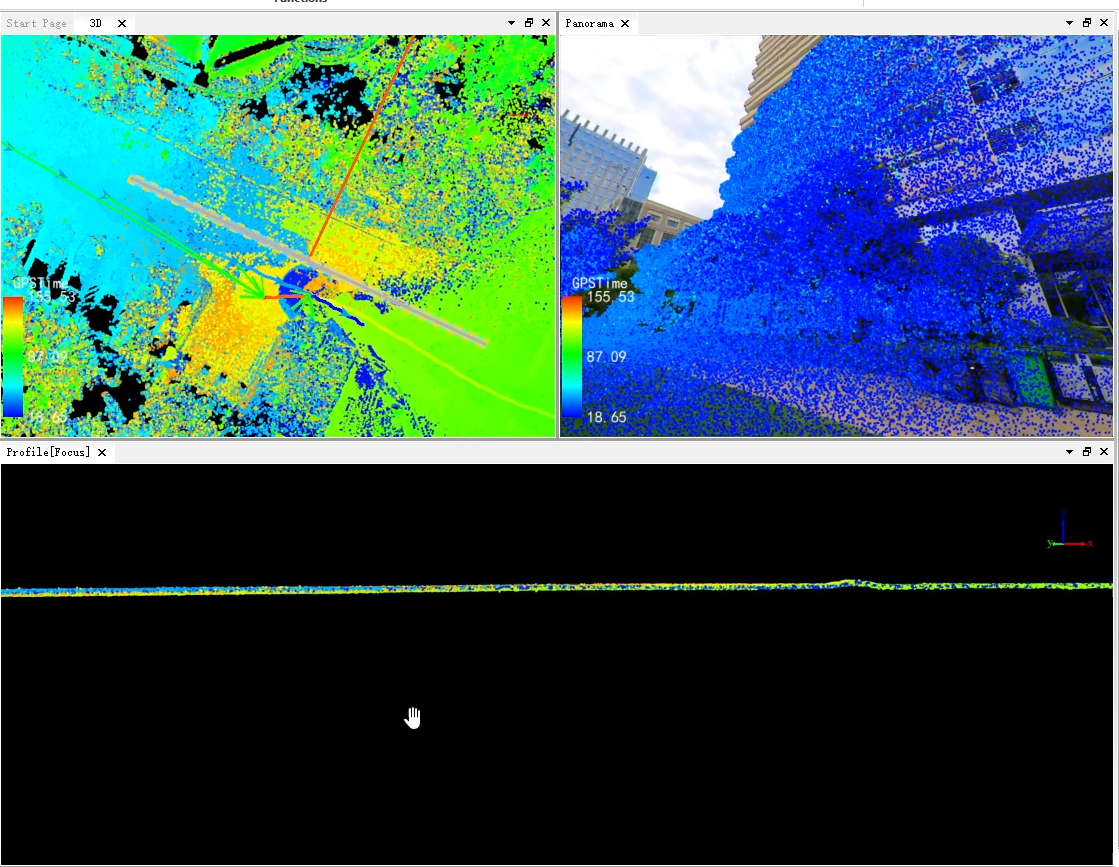
check for mismatch in the overlap area
Incremental merging
If all data has been merged together, but a new set of data needs to be merged, you only need to group the already grouped data with the new data again.
First, move the new data to the already stitched data group.
Start registration

Add new link relationship
coarse registration
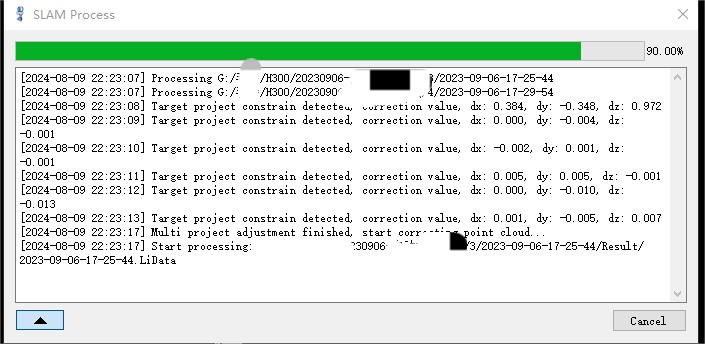
Re-Optimize, waiting for all progress to complete