Auto Vectorization
Note: This function is applicable to indoor house plans and other needs, line elements obvious data
Steps
1.Click the Automatic Vectorization![]() button to bring up a pop-up box:
button to bring up a pop-up box:
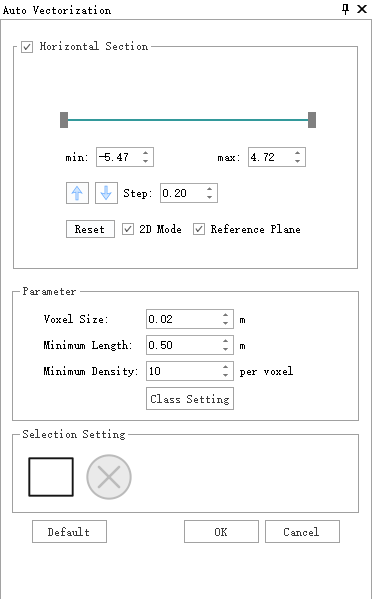
Parameter Dialogue
Parameter Description:
- Horizontal Section Tool: For operations such as operating the position and thickness of horizontal sections.
- Minimum, Maximum: The upper and lower positions of the horizontal section.
- Steps: Setting the step length of the movement, together with the move up
 or move down
or move down buttons, can move the cross-section with the set step length.
buttons, can move the cross-section with the set step length. - Reset: Restore all parameters to their default positions.
- 2D Mode: Tick the box to observe and browse the point cloud data in 2D view; uncheck the box to observe and browse the point cloud data in 3D view.
- Reference Plane: Whether to display the reference plane where the horizontal section is located
In order to ensure the quality of the data, the horizontal sections intercepted need to remove as much as possible the horizontal surfaces such as floors, ceilings, etc., and keep only the vertical wall parts. Also to ensure point density, the recommended thickness (maximum - minimum) is 0.5 metres or more.
Parameters:
Voxel Size:Sample resolution size of point cloud data.
The smaller the voxel, the higher the resolution and the higher the accuracy, but the longer the calculation time. Recommended default values
Minimum Length: the shortest length of the generated vector lines, vector lines smaller than this threshold will be filtered out, used for filtering fine short lines, can be adjusted according to the actual situation
Minimum Density: The minimum value of the number of points within a single voxel, voxels smaller than this threshold are not involved in vector line generation and are used to filter noise. It must not be set too large, too large threshold will cause a sharp reduction in the vector lines generated.
Class Setting:You can set the category information of the point cloud to be filtered, and select only the category in which the wall is located
Selection Setting:
- Rectangular Box Selection: Rectangularly
 boxes a point cloud within a certain range, generating only the vector data that lies within the boxed range. The default is to use all point cloud data.
boxes a point cloud within a certain range, generating only the vector data that lies within the boxed range. The default is to use all point cloud data. - Cancel: Unchecks
 the range of the box.
the range of the box.
- Rectangular Box Selection: Rectangularly
Default: Restores the parameter section to its default value.
OK: After setting the parameters, click the OK button to start the automatic detection.
Cancel: Exit function
2.Click OK to detect automatically
Horizontal section point cloud

Detection results