Manual Classification
Steps
1.Click the ![]() button to set modified classification and targeted classification.
button to set modified classification and targeted classification.
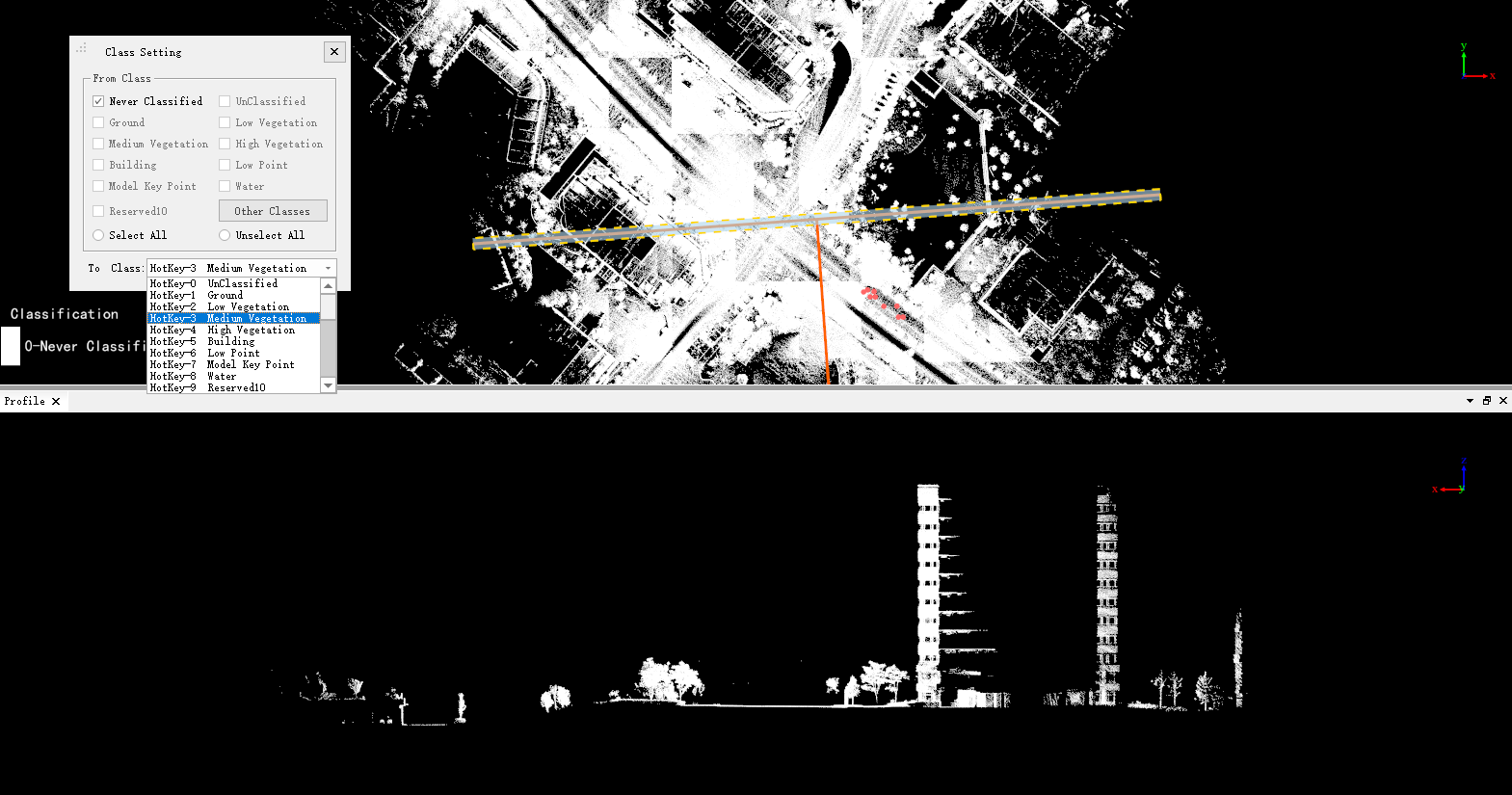
The category that needs to be modified can be determined by checking it. As long as it is selected by the selection tool, it will become the target category of the setting. For example, if you only want to turn unclassified points into vegetation points, you only need to check the unclassified points and uncheck the rest of the categories, and then set the target category to low vegetation points in the drop-down menu. In this way, in the next selection operation, all the selected unclassified points will automatically become low vegetation points, until the next time the initial category is re-checked or the target category is re-selected.
2.Choose a suitable selection tool to modify the point cloud category:
Polygon Selection![]() : It is suggested for complexed polygons using Even-odd Rules. For example, a tree or
a building.
: It is suggested for complexed polygons using Even-odd Rules. For example, a tree or
a building.
Rectangle Selection![]() : In some cases where the shape is relatively simple, or the requirements are not particularly strict, you can directly use the rectangular selection. Compared with polygon selection, the sides of the rectangle selection can only be parallel to the sides of the window. In other words, only rectangles aligned with the coordinate axis of the window are supported.
: In some cases where the shape is relatively simple, or the requirements are not particularly strict, you can directly use the rectangular selection. Compared with polygon selection, the sides of the rectangle selection can only be parallel to the sides of the window. In other words, only rectangles aligned with the coordinate axis of the window are supported.
Circle Selection![]() : In some cases, circular selection is also very convenient, such as choosing a circular pool or a flower bed.
: In some cases, circular selection is also very convenient, such as choosing a circular pool or a flower bed.
Above the Polyline Select ![]() : The point cloud above the line will be selected.
: The point cloud above the line will be selected.
Below the Polyline Select ![]() : The point cloud below the line will be selected.
: The point cloud below the line will be selected.
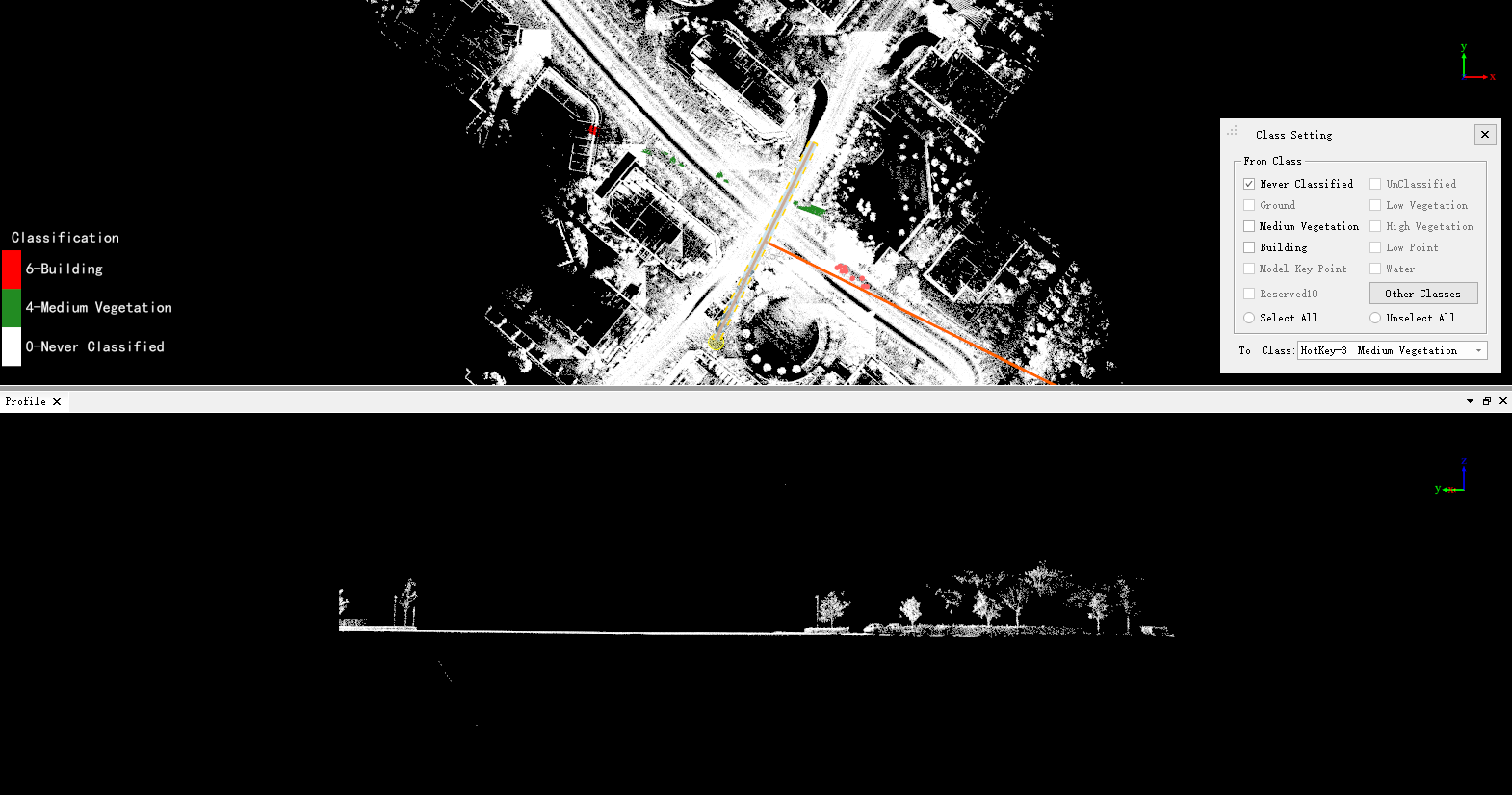
3.Adjust the display mode to display by category, and you can clearly see the point cloud selected in the previous step.

4.(optional) Use Ctrl+Z to undo the previous steps. Or by clicking ![]() button to clear all the unsaved steps.
button to clear all the unsaved steps.
5.Click ![]() to save the profile.
to save the profile.
Example (Use the polygon selection tool to modify the point cloud category):
Draw a polygon (double-click the left mouse button to end the selection), then click to save the result
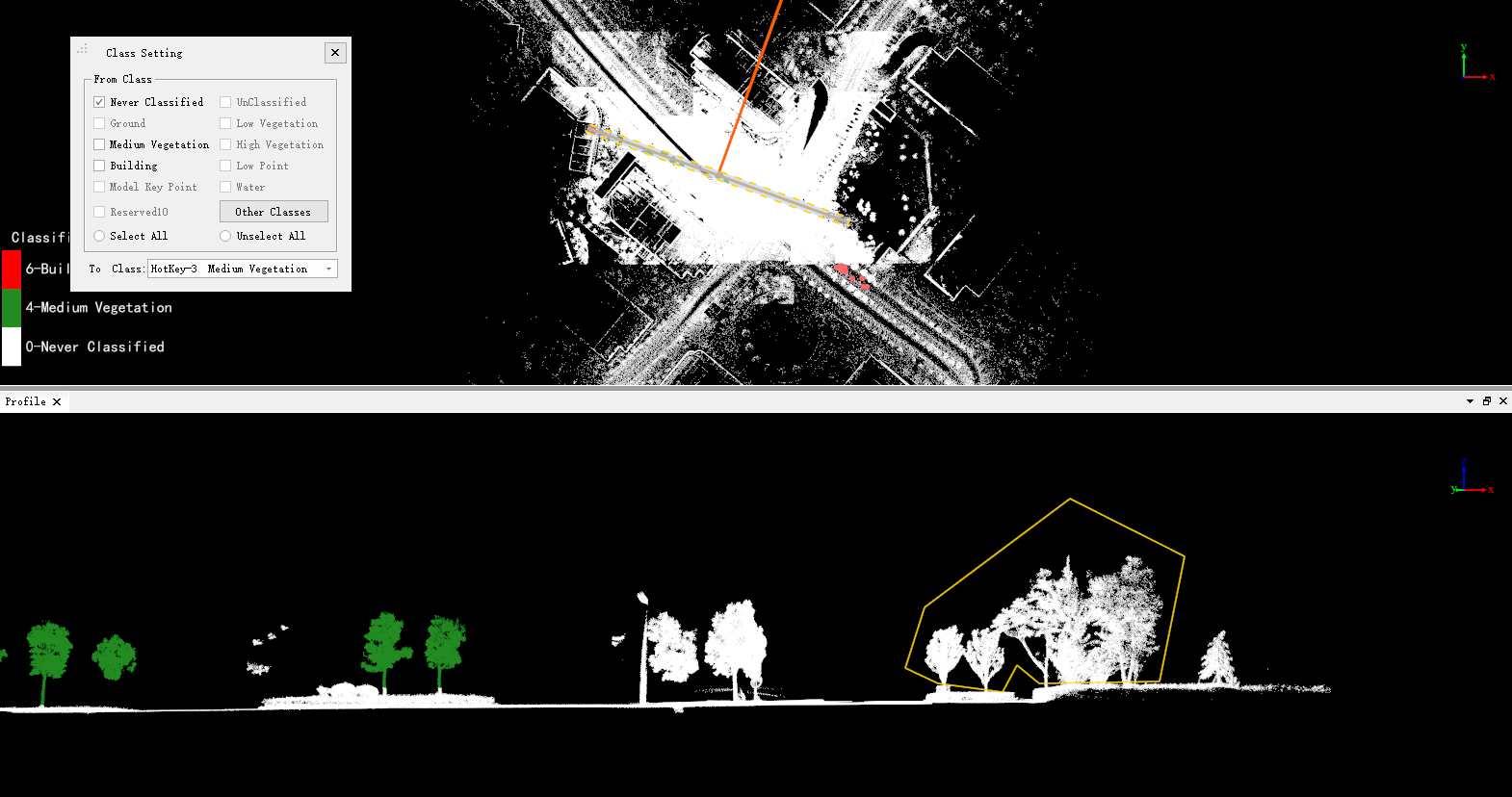
The result of changing the category will be displayed in the main 3D point cloud window in real time.
All operations of point cloud classification are temporary, and must be saved after modification to take effect.