Classify Air Points
Function Description: This function is to classify point clouds that are significantly higher than the surrounding points as airborne noise points. The algorithm idea is the same as the denoising principle in the data management module.
Steps
1.Click Classify Air Points![]() button, pop up the Classify Air Points dialog box.
button, pop up the Classify Air Points dialog box.
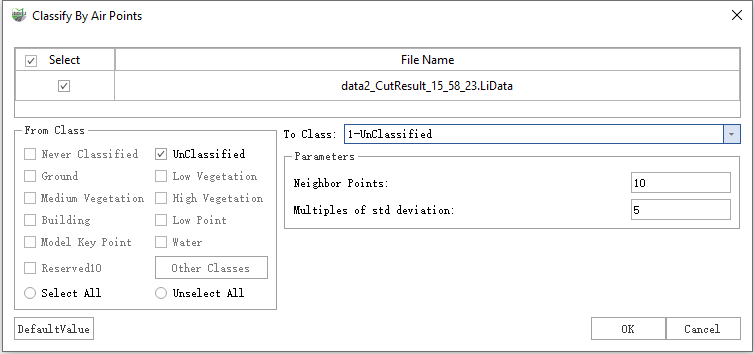
Parameter description:
- Input Data: The input file can be a single point cloud data or a point cloud dataset.
- From Class: Source class(es).
- To Class: Target class.
- Neighbor Points: The default is "10", the number of neighbors that will be used to determine whether a point is a noise in the sky. Calculate the distance between each point to the nearest point and calculate the standard deviation of the nearest distances.
- Multiples of std deviation: The default is "5", if the deviation of points beyond the minimum allowable threshold, they are considered as noise in the sky. The larger the threshold, the less the noise will be divided into.
- DefaultValue: Click this button to set all parameters as default.