Classify Low Points
Function Description: The low point refers to the noise point that is lower than the actual terrain. The existence of the low point will affect the extraction of the ground point, because the progressive triangulation filtering algorithm is based on the seed points represented by the lowest point of the gridded point cloud. Therefore, filtering out the low point is a preprocessing operation, which directly affects the filtering effects, the establishment of a digital model, and the generation quality of contour lines.
- The distribution of low points is divided into individual points or clusters. The algorithmic flow of this function is:
- Traverse the point cloud and search for points to be classified within a certain range of radius of the current single point or point cluster.
- Calculate the maximum height difference between the current point and the neighboring point, which is compared with the threshold.
- If the value is greater than the threshold, the current point is considered to be a low point, otherwise, it is not classified as a low point.
Steps
1.Click Classify Low Points![]() button, pop up the Classify Low Points dialog box
button, pop up the Classify Low Points dialog box
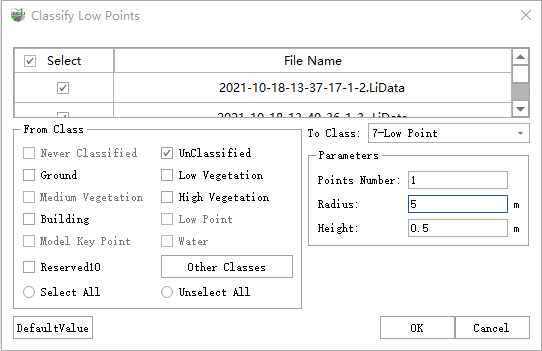
Parameter description:
- Input Data: The input file can be a single point cloud data or a point cloud dataset.
- From Class: Source class(es).
- To Class: Target class.
- Points Number: The default is "1". When the number of points is set to 1, the single low point is classified. If it is greater than 1, cluster low points are classified.
- Radius (meters): The default is "5", the radius threshold between the unclassified point and the neighboring point.
- Height (meters): The default is "5", the height difference threshold between the unclassified point and the neighboring point.
- DefaultValue: Click this button to set all parameters as default.