Cylinder Detection
Steps
1.Click on the Cylinder Detection ![]() button.
button.
2.The Cylinder Detection Dialog Box pops up.
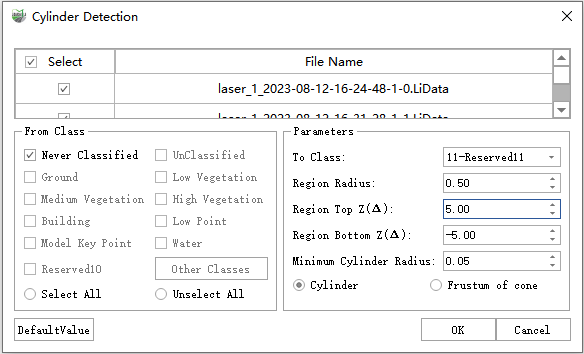
Cylinder Detection Dialog Box
Parameter Description:
Selection: Select the point cloud file to participate in the detection.
Source Category: Set the point category for detection.
Parameters:
To Class: The category to which the detected set of points inside the cylinder should be written.
Region Radius: Used in conjunction with seed points, perform cylinder detection within a three-dimensional cylindrical range formed with the seed point as the center and the region radius as the radius.
This parameter should be set based on the size of the cylinder to be detected, which should be equal to or greater than the size of the resulting cylinder.
Region Top Z(Δ): The relative position of the upper surface of the three-dimensional cylindrical range to the seed point. Please note that there are positive and negative values, where positive values indicate being located above the seed point, and negative values indicate being located below the seed point.
Region Bottom Z(Δ): The relative position of the lower surface of the three-dimensional cylindrical range to the seed point. Please note that there are positive and negative values, where positive values indicate being located above the seed point, and negative values indicate being located below the seed point.
Minimum Cylinder Radius: If the detected cylinder's radius is smaller than the set radius, discard the cylinder.
This parameter is used to filter out small cylinders.
- Cylinder, Frustum of cone: Cylinder representation involves fitting based on a cylindrical shape, while frustum representation involves fitting based on a frustum (a truncated cone) shape.
This parameter is used to avoid overfitting.
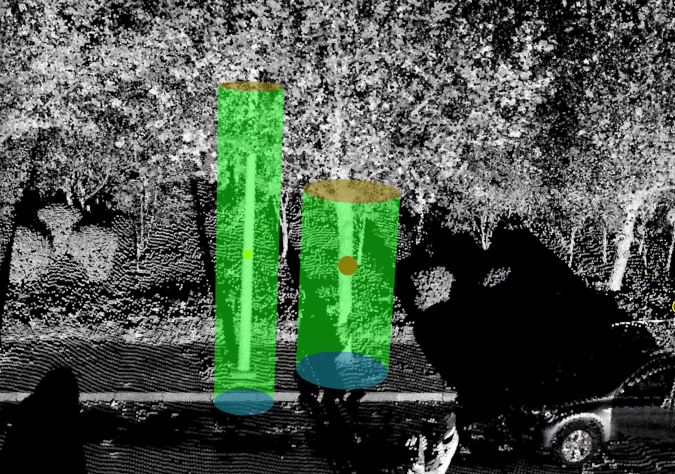
3.Use the left mouse button to click in the point cloud to select seed points. Multiple seed points can be selected.
Use the right mouse button to go back one seed point.
Seed Point Selection
Each three-dimensional cylinder can be adjusted in size.
The seed point represents a larger-sized region, indicating the currently adjustable size for the three-dimensional cylinder.
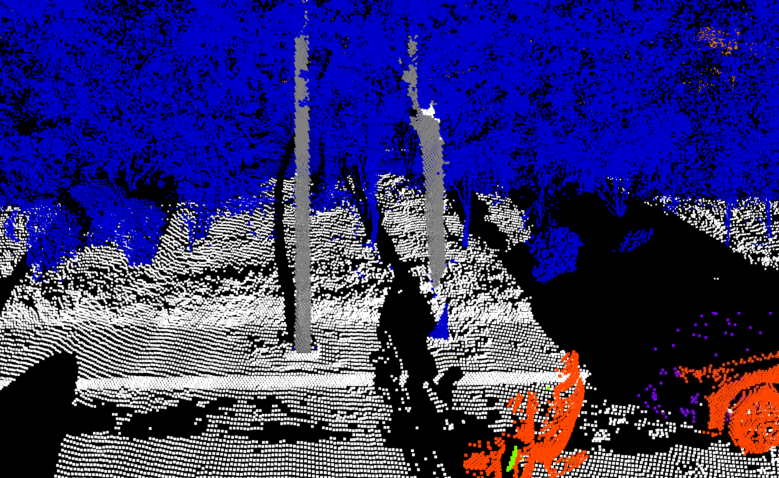
4.Click Confirm to start cylinder detection.
The cylinder results are stored in the additional attributes with the name GroupID. After the detection ends, the cyclic additional attribute display is automatically activated.
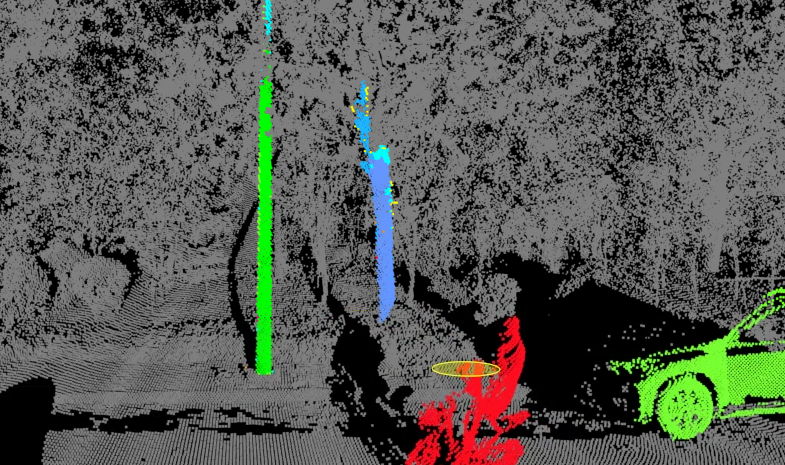
Result Display