Classify by Deep learning
Steps
1.Click Classify by Deep learning![]() Button, pop up the Classify by Deep learning dialog box
Button, pop up the Classify by Deep learning dialog box
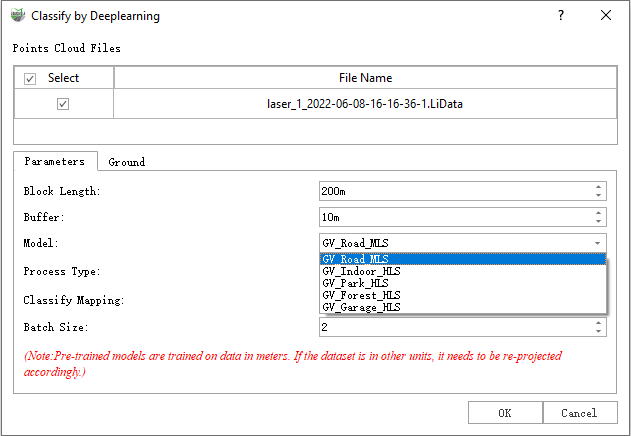
Note: Pre-trained models are trained on data in meters. If the dataset is in other units, it needs to be re-projected accordingly.
Parameter description:
- Input Data: For data that needs to be classified, you can check one or more point cloud data.
- Block Length: The point cloud within the project will be processed in blocks, and a block length of 200m is recommended. If the user's computer has limited memory, the block length can be set to 100m. If the block length exceeds 200m, it will consume more memory, while lengths below 100m may affect classification accuracy and increase inference time.
- Buffer: The length of the overlapping area between blocks after the point cloud is divided into blocks. Keeping the default value of 10m is sufficient.
Model: The model used for deep learning classification. The software provides five models by default:
- GV_Road_MLS model is a dataset trained using a larger urban road scene and supports unClassified, Ground, Low Vegetation, High Vegetation, Building, Wire, Static Cars, Dynamic Cars, Guardrail, Pole, Pedestrain, a total of 11 categories.
- GV_Indoor_HLS model for SLAM data indoor scene classification.
- GV_Park_HLS model for SLAM data park scene classification.
- GV_Forest_HLS model is suitable for forestry scene data.
- GV_Garage_HLS model is suitable for indoor parking lot scene data. Point clouds with similar scenes can use this model.
- GV_Railway model is suitable for classifying railway scenes.
Note: If the data contains above ground and below ground, you need to split the data scene into above ground part of the data and below ground part of the data to select the corresponding model for classification. For indoor multi-story housing data, it is also necessary to split the data into layers and categorize them separately.
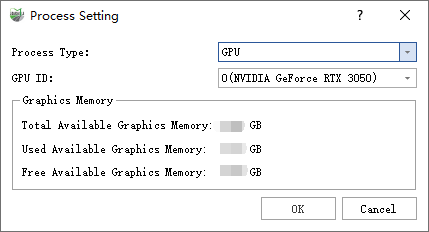
Process Type: There are two processing modes: GPU and CPU, the default is CPU mode, if the computer graphics card performance is high, you can switch to GPU mode on your own, GPU efficiency will be about twice as high as the CPU, and if the computer has more than one graphics card, you can choose the right graphics card on your own, here it is highly recommended to use NVIDIA graphics card for GPU mode classification.
- Classify Mapping: Map the category and map the category to the corresponding category label.
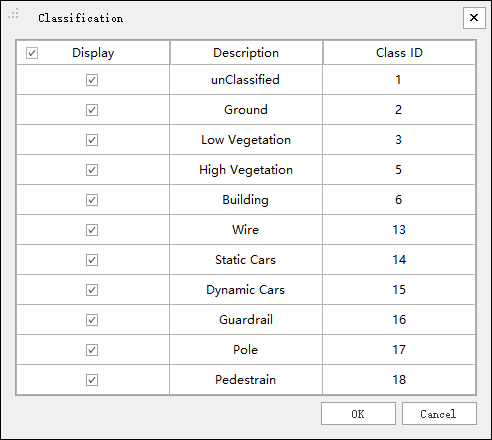
Here you can set your own categories and labels according to user needs, such as: The corresponding class ID for unClassified is 1.
Batch Size: Indicates the number of point cloud samples processed each time, the higher the computer memory and display memory, the larger the set value, and the faster the overall processing speed. Software already set default value is set according to the performance of the computer. Users can refer to the table below to adjust the memory size, with a recommendation not to exceed 8.
GPU Memory Size 8GB 10GB 11GB 12GB 16GB 24GB Batch Size 2 2 2 2 4 4 Ground Optimization: Default checked. During the deep learning classification process, ground optimization is performed to improve the classification accuracy of ground points. Refer to Classify Ground Points for specific parameter details.
Before Classify by Deeplearning
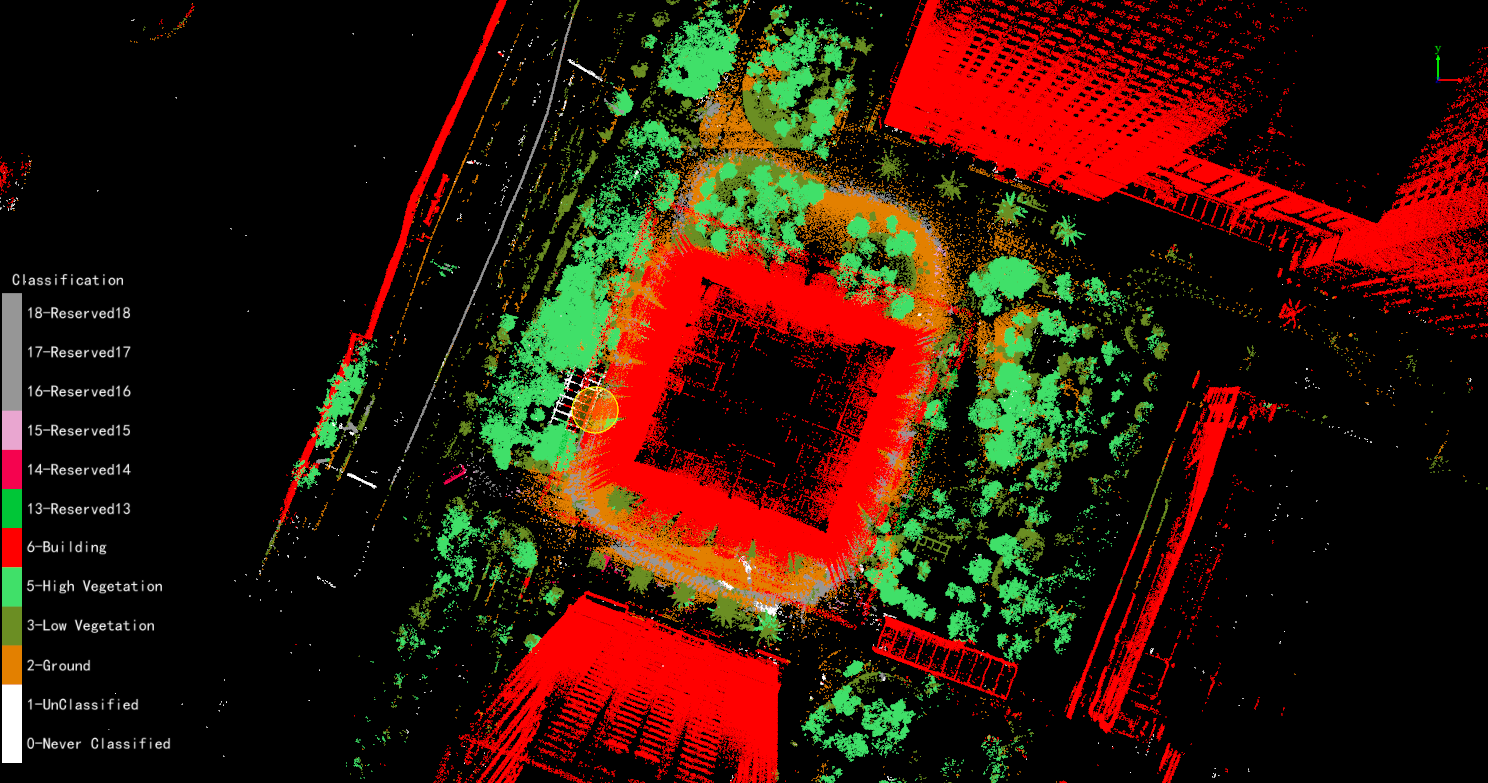
After Classify by Deeplearning