New Liscan Project by Existing Data File
Step
1.Import existing point cloud, trajectory, image, and other data.
Click ![]() button in the Project window in the upper left corner of the software's main interface,the New Project wizard configuration original data page appears, and users can add point clouds, trajectory, images and other data customizedly.
button in the Project window in the upper left corner of the software's main interface,the New Project wizard configuration original data page appears, and users can add point clouds, trajectory, images and other data customizedly.
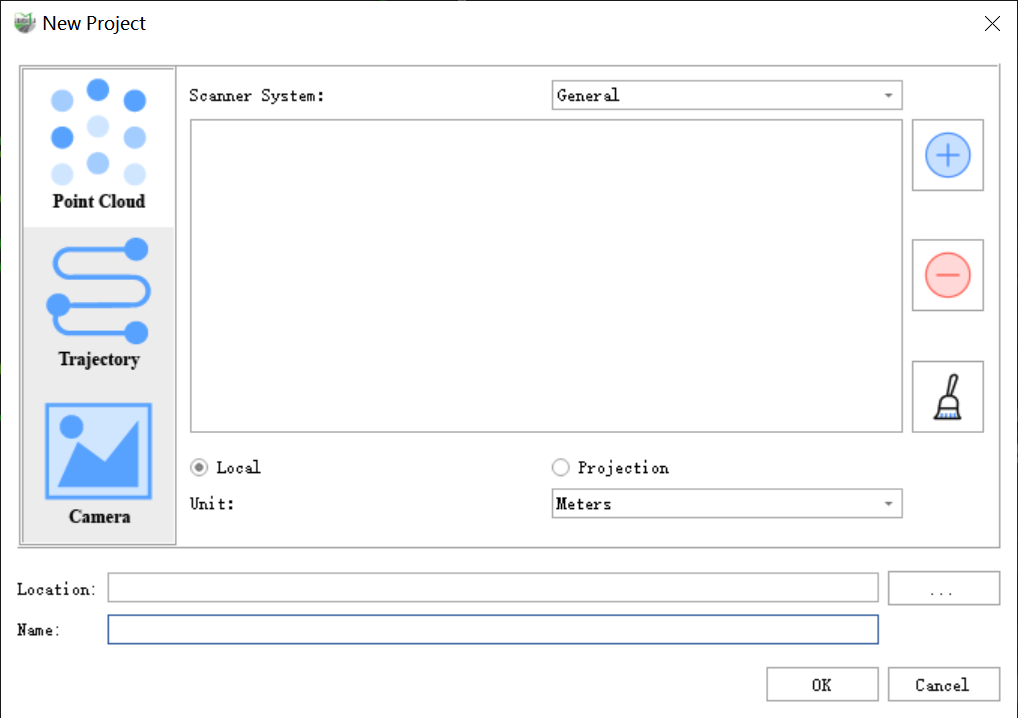
New Project
Before starting to process the data, it's recommended to gather all collected data into a fixed directory onthe local disk of the computer. The directory name should be in English or in numerical characters, such as"LiDARData". The New Project Wizard mainly includes adding point cloud data, trajectory data (optional),panoramic/flat image data (optional), and setting the project file path.
Scanning System
Scanning systems supported: General, Trimble, Lecia, Orbit, Riegl, LIDARUSA, Navvis. Once the scanningsystem is set, the file format filter willbe applied according to the scanning system set when selecting thecamera file path.
Set Point Cloud File Path
The software supports *.LiData, *.las, *.laz, *.e57 point cloud files.
- Add: Add point cloud data files, multiple selections are supported.
- Delete: Deletes the point cloud file path selected on the left.
- Clear: Clears all point cloud file paths.
- Coordinate System: lf the point cloud data file has coordinate svstem information, the coordinate systeminformation of the point cloud data file will be filled in, Users can also set the coordinate svstem themselves.
Set Trajectory File Path
The software supports *.traj, *.pos,*.txt, *.csv, *.asc, *.xyz,*.pts, *.out trajectory files.
- Trajectory File: You can directly edit the box to input the trajectory path, or use the browse button on theright to choose the trajectory file.
- Trajectory Format Selection: You can choose to convert the trajectory format, including:
- None:No format conversion.
- OriginalSystem andTarget System: Select the time format of the input trajectory file and the outputDtime format, and choose the measurement date for conversion.
- Multiplication and Addition Constants: Use a formula to linearly transform the time, output time = a*input time+b.
- Heading Angle Adjustment: Perform meridian convergence angle conversion on the trajectory.
- Conversion Options: Conversion options for the trajectory coordinate system, users can choose whether touse the seven parameters.
Set Camera File Path
Image Information: Support for panoramic images and planar images
Panoramic lmage
Camera File: input panoramic image file.
The software supports *imglist, Leica Peaasus *.csv file, Trimble MX9 *.csv file, Riegl MMS *.csv file, LIDARUSA SNOOPY *.txt file , OrbitPos *.txt *.csv files.
Planar lmage
Camera File: supports suffix .imglist, Leica Peaasus \.csv file, Trimble MX9 *.csv file, Riegl MMS *.csv file, LIDARUSA SNOOPY *.txt file , OrbitPos *.txt *.csv files.
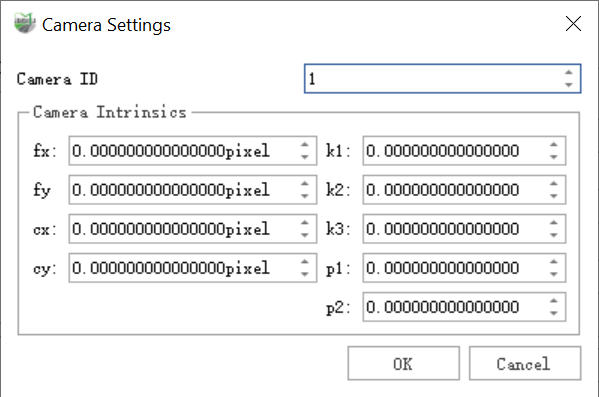
Camera Parameters: Users can choose our company's cal calibration file as the parameter import, or you canclick the add button in the camera parameters to manually add the calibration parameters of the flat camera.you need to fill in the camera lD, the internal parameters of the camera, the axis angle of the installationstructure, and calibration parameters.
- Camera lD:When the device has multiple cameras, the camera lD is cumulative, corresponding to theCameraName field in the.
Camera lnternal Parameters: f is the focal length; cx, cy are the offsets of the optical axis to the coordinate center ofthe projection plane; k1, k2, k3 are the coefficients of the Taylor series expansion.used to correct the radial distortion caused by the lens; p1, p2 are used to correct the tangentialdistortion caused by the lens; b1 and b2 are generally not required to be filled in.
Steps
1.Select the planar image, and add the image file.
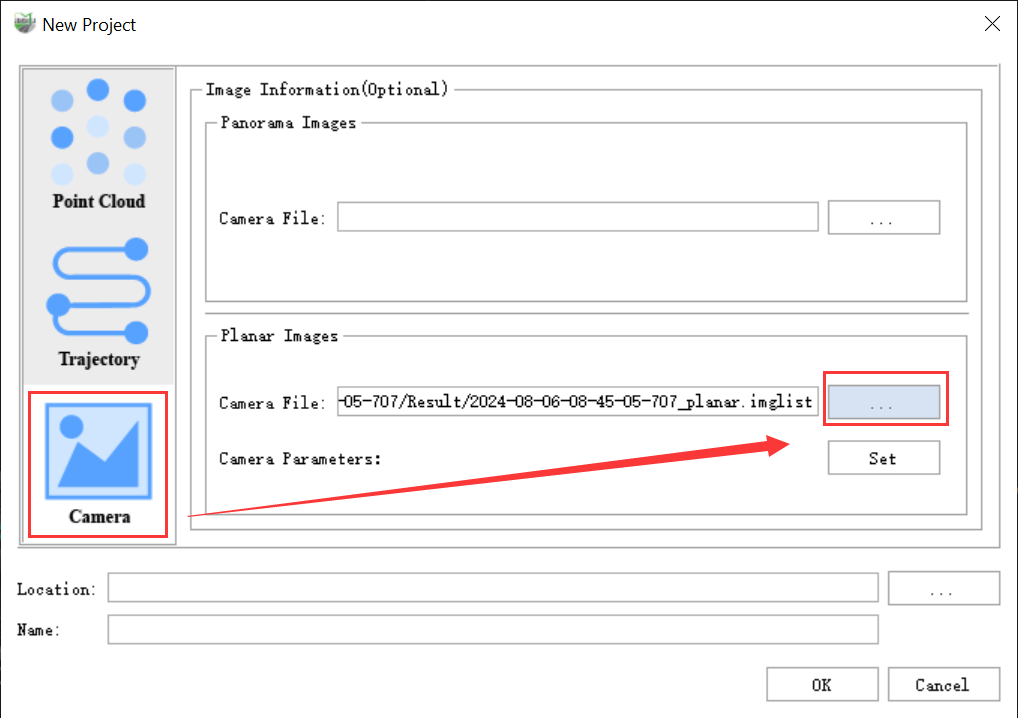
Add the Image File
2.Click Settings, and the Camera Settings dialog box pops up.
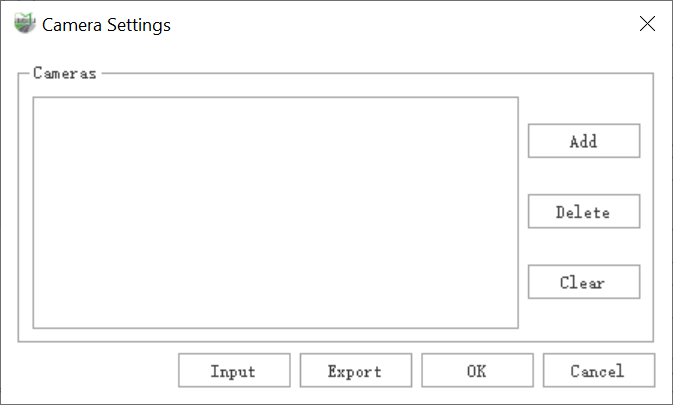
Camera Settings
3.click the Import button to directly import the *.cal calibration file or the saved ini file, or users can manually add the calibration parameters of the planar camera.
Camera Settings
4.Click the OK button after the setting is completed.
Set Project File Path
- Location: Set the folder where the project file is stored, which will be in the same level directory as the pointcloud by default, and the path can also be changed.
- Name: Set the name of the project file, named by the current time by defauit.
2.Users can see the software project window, as shown in the figure, and the directory tree will be automatically generated.
Directory Tree - Active Project
Use this method to create a new MLS project. The POS Process and Georeference operation steps cannot be executed again.