Detect Damage
Steps
Click Detect Damage
 button, The following dialog box is displayed.
button, The following dialog box is displayed.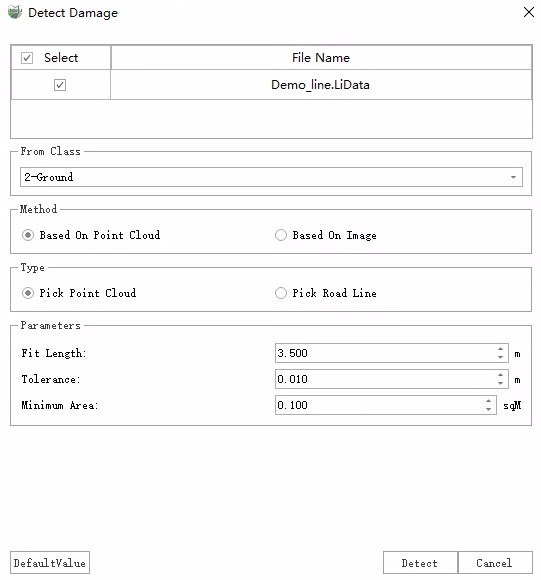
Detect Damage Dialog
After completing the settings, click Detect to perform damage detection.
After the probing is completed, two results are written: vector polygon and point cloud additional attributes.
- Vector Polygon: The vector results are stored in the "Damage Region" layer as polygons, and information such as the type of damage, the level of damage, the area, the length, the width, the maximum depth, and so on for each break.

Damage Polygon
Point Cloud Additional Attributes: The depth value corresponding to each broken point in the point cloud is written to the additional property "DamageDistance", which can be displayed in the following ways.
Display: In the View Mode window, select Intensity in the Color By drop-down box, and check With Pavement Damage, and the settings and display effects are as follows:
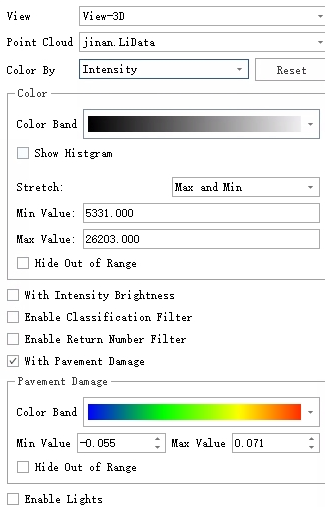
Set Pavement Damage Rendering
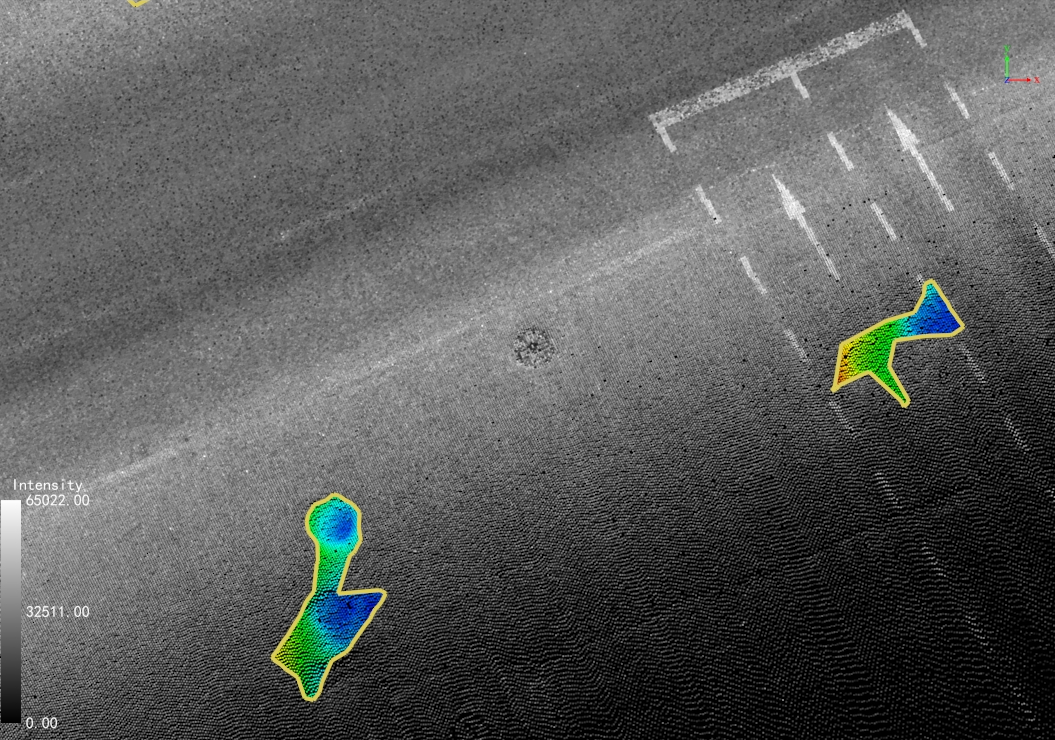
Pavement Damage Rendering
Look at the depth value: Use Pick Point to get the "DamageDistance" additional attribute value for each point to see the specific depth.
- Vector Polygon: The vector results are stored in the "Damage Region" layer as polygons, and information such as the type of damage, the level of damage, the area, the length, the width, the maximum depth, and so on for each break.
Parameter Settings
Cloud File: Select the point cloud files that participate in the detecting.
From Class: Select the category in which the breakage point is located, or all categories if no classification is performed. (In order to obtain more accurate results, it is recommended to classify the point cloud first)
Method: It supports the detection of point cloud and image data sources, and can be selected according to the actual collected data type. It's only one method can be selected for a single detection.
Based On Point Cloud: Based on the analysis of the geometric characteristics of the point cloud, the detection results are obtained.
Based On Image: The images are inspected by deep learning and the results are mapped back into 3D space. Panoramic cameras and flat cameras are supported.
Type: According to the Method, there are different corresponding types.
Based On Point Cloud: There are two types that are Pick Point Cloud and Pick Road Line.
Pick Point Cloud: A scene used for local marquee detection on a point cloud.
Pick Road Line: A scene for complete detection of the entire road. According to the left and right width of the road set, the analysis area is divided into standard blocks along the direction of the road centerline, and each block is a damage detection unit with a size of 225 square meters. You can still select one or more road centerlines in the scene, or you can select the entire layer in the Layer drop-down box.
Layer: Lists all the line layers of the current project, and when one of them is selected, all vector objects in that layer are selected as road lines.
Left Width: The width of the left side of the road line, which limits the detection range on the left side.
Right Width: The width of the right side of the road line limits the detection range on the right side.
Based On Image: There are two types that are Built-in Model and Custom Model.
Built-in Model: Images are detected using the software's built-in deep learning inspection model.
Custom Model: For scenarios where there are existing detection results (JSON files), select the folder where the JSON file is located (the name of each JSON file must be the same as the name of the corresponding image). This function will read the existing results and reverse the projection into 3D space, and obtain the final result after merging and fusion.
Camera Options: This is effective for the Based On Image method. The camera list includes the cameras set in the project, which are introduced below.
- **Built-in Model**: Select panorama or planar camera, check to use the camera, and the ID can more accurately control the photos involved in the detection. In addition, if the device has an independent GPU, you can switch the GPU for detection. - **Custom Model**: You need to select the camera to which the custom model belongs. For example, if the custom module is generated from a panorama photo in the project, select the panorama camera.Parameters: Depending on the Method, you need to set different parameters. The first two parameters are used in the Based On Point Cloud.
Fit Length: The length of the damage detection strip, which is generally the width of a lane. When the damage is large, the value can be increased appropriately.
Tolerance: It's one of damage threshold. Damage while detpth is less than this threshold will be filtered.
Mininum Area: It's one of damage threshold. Damage while area is less than this threshold will be filtered.