Drape To Ground
Steps
1.Click the Drape To Ground ![]() button in the vector editor.
button in the vector editor.
2.Pop up Drape To Ground:
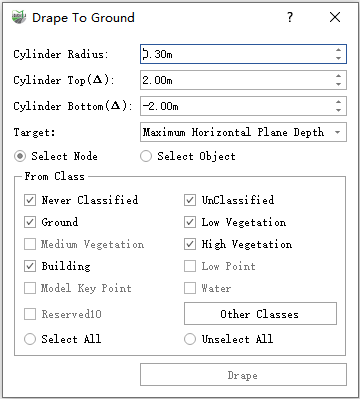
Drape To Ground
Parameter Description:
The Drape To Ground function, within a cylinder, performs the search and calculation of the point cloud to achieve the ground-fitting. The cylinder, with the principal axis direction parallel to the Z-axis and the center of the principal axis as the vector node in the current calculation, is referred to hereafter by the search cylinder as a surrogate for the cylinder.
Cylinder Radius: Default is 0.3 m. Search for the radius of the column.
Cylinder Top(Δ): The default is 2.0 m, which means the upper surface is located 2.0 m above the current node, and the relative height of the upper surface of the search cylinder to the current node. Can be negative, which means the upper surface is located below the current node.
Cylinder Bottom(Δ): The default is -2.0 m, which means the lower surface is located 2.0 m below the current node, and the relative height of the lower surface of the search cylinder to the current node. Can be a positive value, which means the lower surface is located above the current node.
Note: The upper surface value should be greater than the lower surface value
Target: Default is the lowest depth, the current node needs to fit to the surface location, physical meaning see the search column schematic below
Minimum depth: without changing the XY value of the current node, the Z value takes the average Z value of the effective layer where the lowest point is located
Maximum depth: without changing the XY value of the current node, the Z value takes the average Z value of the effective layer where the highest point is located
Maximum point depth: without changing the XY value of the current node, the Z value is taken as the average Z value of the layer with the highest number of points in the search cylinder
Average depth: without changing the XY value of the current node, the Z value takes the average of the lowest depth and the highest depth
Median depth: without changing the XY value of the current node, the Z value takes the Z value of the middle valid layer in the search cylinder
Lowest point: move the current node to the lowest point within the search cylinder
Highest point: move the current node to the highest point of the search column
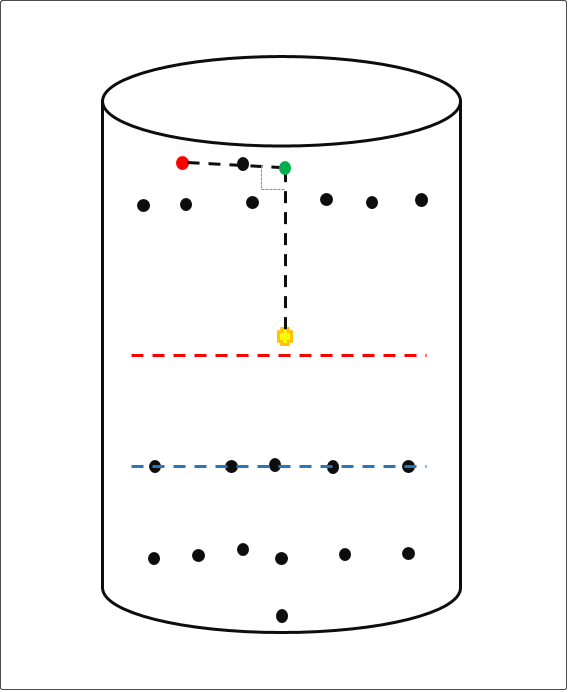
Schematic diagram for searching columns
The middle yellow point is the current node, the red point is the highest point, the green point is the virtual point represented by the highest depth, the red dashed line represents the average depth, and the blue dashed line represents the median depth
Select Node: Polygon box selection method, select the area to be grounded, the nodes of vector objects located in the area will be grounded
Select Object: Tap to select a vector object and fit all the nodes of the object, you can tap multiple objects and calculate at the same time
From Class: Select the category point cloud to be used for the calculation
Drape: The node selection method is not available. After selecting the object, click the button to start the fitting operation.
Select node mode
1.Mouse box the nodes that need to be grounded.
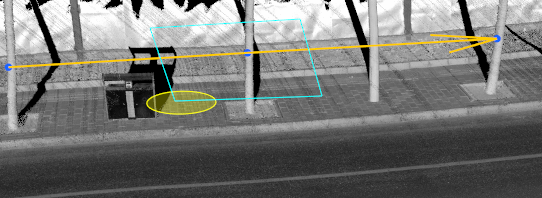
Check the nodes that need to be grounded
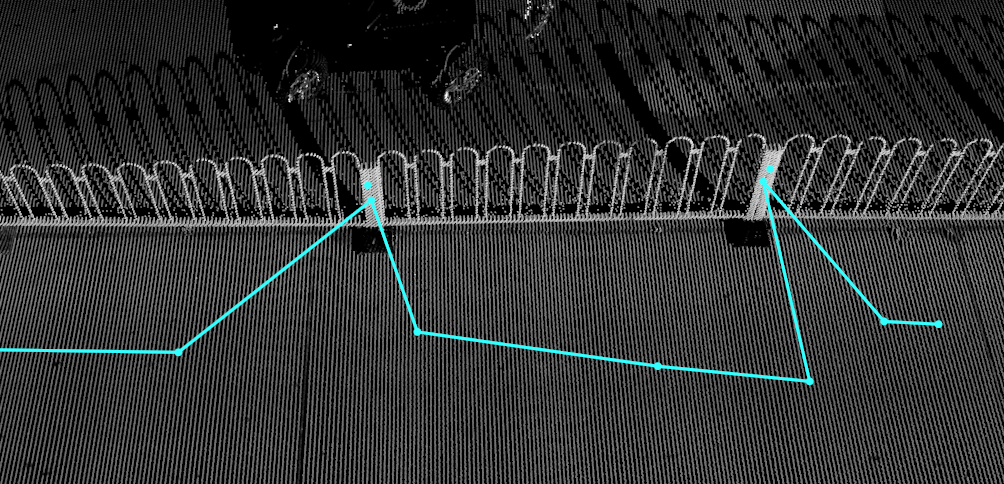
2.After the box is selected, double-click the left mouse button and the program will automatically calculate and ground the vector nodes in the range.

The effect of the node after grounding
Select object method
1.Mouse click on the object to be grounded, click on the process, you can use the right mouse button, back a selection
Tap on the object to be grounded
2.Click the fit button to ground the selected object
The effect of the object on the ground