Trunk Based Segmentation
Function Overview
Unlike Point Cloud Segmentation, this function divides point cloud segmentation into two separate steps: "Stem Extraction" and "Point Cloud Segmentation". The first step uses deep learning to extract the tree stems (López Serrano et al., 2022). The second step grows the rest of the canopy from these stems. This method is less affected by underbrush compared to TLS Point Cloud Segmentation and provides more accurate stem counts, especially for plantations with DBH greater than 10 cm.
Usage
Click Ground Forestry > Trunk Based Point Cloud Segmentation.
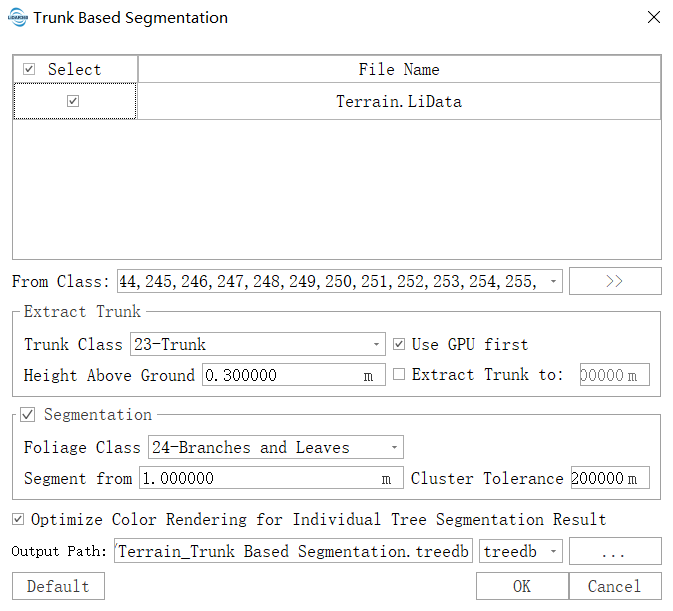
Parameter Settings
- Select Data: The input data must be normalized point cloud data. For the normalization method, refer to Normalization or Normalization by Ground Class. The input file can be a single point cloud data file or a point cloud dataset; the data to be processed must be open in the LiDAR360 software.
- From Class: The initial class for point cloud segmentation, with the default set to all classes.
- Extract Trunk: The necessary step for stem extraction.
- Trunk Class (default "23"): The segmented stems will be marked with this class.
- Height Above Ground (meters) (default "0.3"): Only point clouds higher than this value will be used for stem extraction. This parameter reduces the impact of ground point cloud thickness or weeds on individual tree segmentation. Setting this value too high may affect the accuracy of detecting tree diameters.
- Segmentation (default "Checked"): When checked, stems will only be segmented up to 5.0m.
- Foliage Class (default "23"): The segmented canopy will be marked with this class.
- Cluster Threshold (meters) (default "0.2"): Adjusting this parameter controls the efficiency and accuracy of individual tree segmentation. The value controls the detection of individual trees and the growth of canopy point clouds. A larger threshold increases segmentation efficiency but may negatively affect segmentation results.
- Segment From(meters) (default "1.0"): Only point clouds higher than this value will be used for canopy segmentation. Points below this height remain part of the stem. This parameter further reduces the impact of ground point cloud thickness or weeds on individual tree segmentation. Setting this value too high may exclude low canopies from segmentation, affecting the determination of branch height. Setting it too low will fail to effectively reduce the impact of underbrush on segmentation results.
- Optimize Display Colors for Individual Tree Segmentation Results (default checked): Reorganizes the ID information of segmented trees to significantly reduce the assignment of the same color to adjacent trees.
- Output Path: Each point cloud data file will generate corresponding segmentation results. The results are in a comma-separated CSV file, including tree ID, x and y coordinates, tree height, DBH, canopy diameter, canopy area, and canopy volume attributes. For more details, refer to the appendix on Individual Tree Segmentation Result File Format. To view the segmentation results, see View Point Cloud Segmentation Results.
- Default Values: Resets the parameter settings to their default values.
Impact of Parameters on Results:
| Parameter | Effect |
|---|---|
| Height Above Ground |  |
| Initial Segmentation Height | 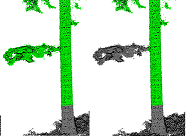 |
@inproceedings{
author={López Serrano et al., 2022 F.R. López Serrano, E. Rubio, F.A. García Morote, M. Andrés Abellán, M.I. Picazo Córdoba, F. García Saucedo, E. Martínez García, J.M. Sánchez García, J. Serena Innerarity, L. Carrasco Lucas, O. García González, J.C. García González},
title={Artificial intelligence-based software (AID-FOREST) for tree detection: A new framework for fast and accurate forest inventorying using LiDAR point clouds},
booktitle={Int J Appl Earth Obs Geoinf., 113 (2022), Article 103014},
year={2022}
}