Boresight
Functional Overview
Brief: In the Boresight module, airborne LiDAR point clouds of overlapping strips can be aligned through boresight calibration. This module includes the following functions: loading/deleting/splitting trajectories, cutting point cloud according to trajectories, matching trajectory and point cloud, transforming point cloud based on boresight calibration parameters, eliminating point cloud redundancy (cut overlap), etc.
Usage
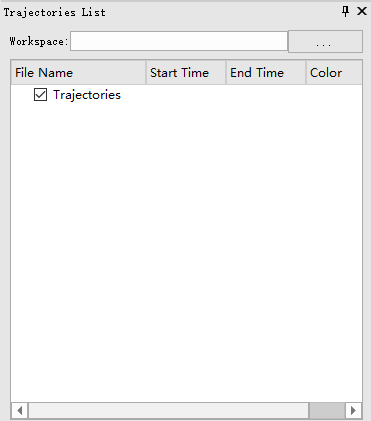
- Open boresight module. Click ToolBox > Strip Alignment > Boresight or Preprocessing > Boresight, and the corresponding toolbox and Trajectories List Widget is shown as follows.

 Open Trajectory Files: After clicking this button, an interface pops up to ask you to set the workspace.
Open Trajectory Files: After clicking this button, an interface pops up to ask you to set the workspace.
Set the workspace and a dialog for adding trajectories will be shown as follows.
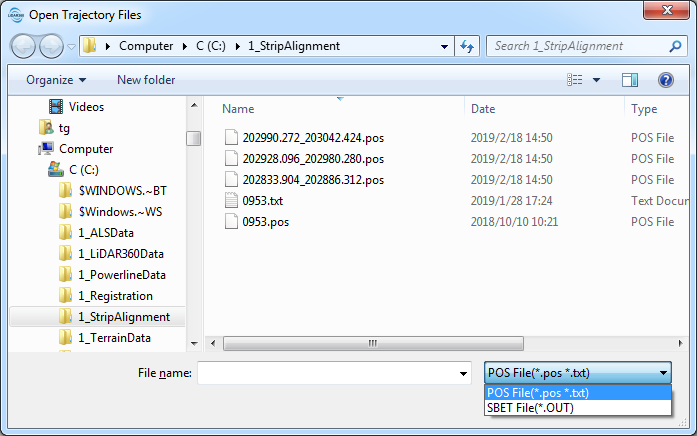
LiDAR360 supports two formats of trajectory files: POS(*.pos) (text format file) and SBET(*.out)] (binary format file).
POS File Example 1: If the POS file does not contain GridX and GridY information, the user has to specify following headers (GPS time, longitude, latitude, height, roll angle, pitch angle and yaw angle) for data columns. An example is shown as follows.
It is required to select the correct projection coordinate system as the following picture.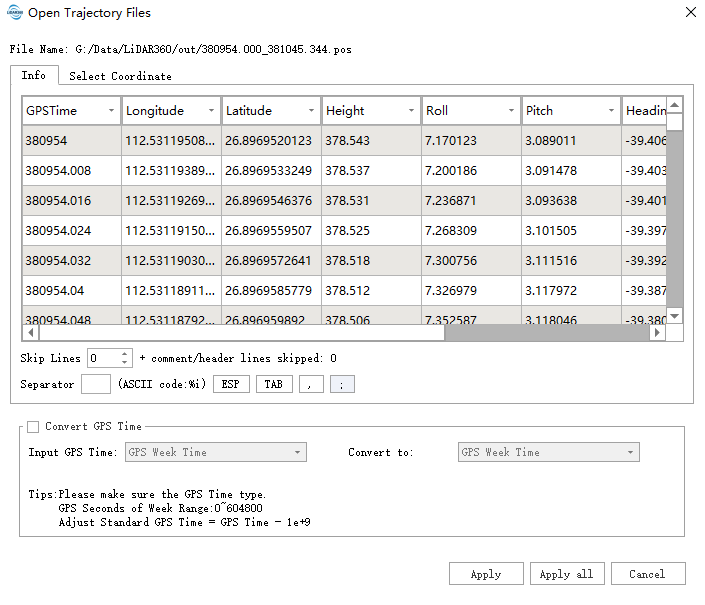
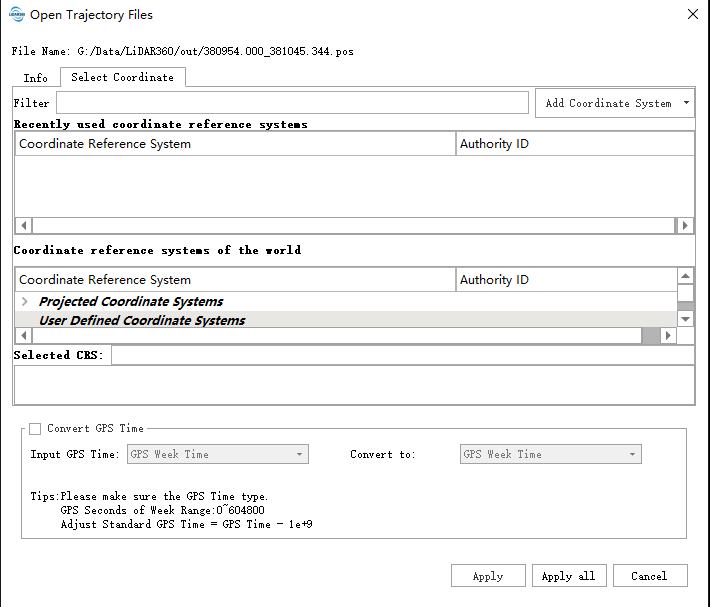
POS File Example 2: If the POS file contains GridX and GridY information, the user has to specify following headers (GPS time, longitude, latitude, height, roll angle, pitch angle, yaw angle, GridX and GridY) for data columns. An example is shown as follows.
If the information of GridX or GridY is not correct, the POS File Example 1 can be used.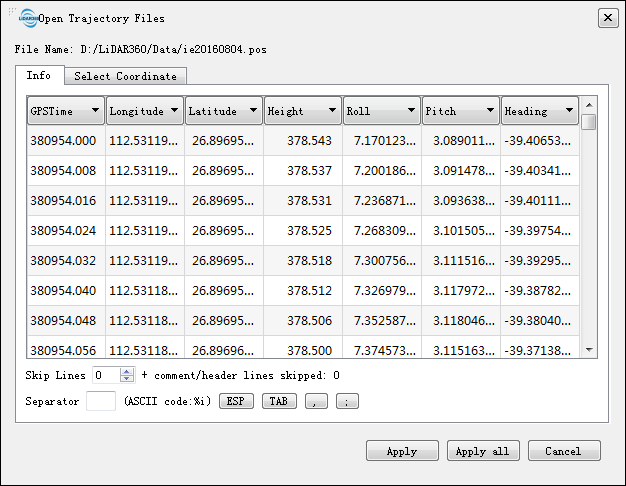
For both of the two examples, click "Apply" to make the current settings apply on current trajectory file, and all the trajectory files will be affected by the current settings if you click "Apply all".
The information of added trajectories will be shown in Trajectories List Widget. (Optional) Click to set the workspace.
to set the workspace.
 Pick Point: Left click a certain point in the trajectory and the information of this point will be displayed.
Pick Point: Left click a certain point in the trajectory and the information of this point will be displayed.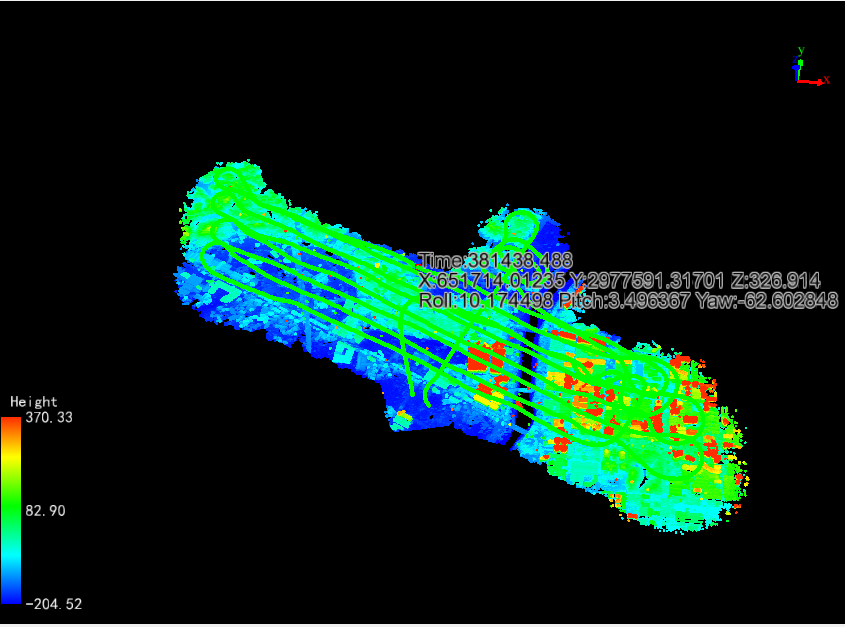
Segment Select
4.1 Auto Split Trajectory
- Click the Automatic Trajectory Line Splitting
 button to open the automatic splitting parameter setting dialog box.
button to open the automatic splitting parameter setting dialog box.
- Click the Automatic Trajectory Line Splitting
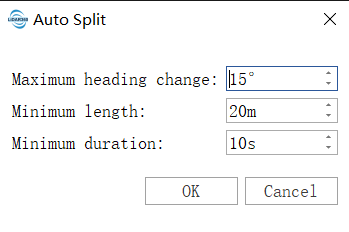
- Set the parameters and click OK to start automatic splitting.
- Parameter Settings
- Maximum Heading Change: The change in heading angle of the automatically cut trajectory segment does not exceed the set value.
- Minimum Length: The minimum length of the automatically cut trajectory segment is not less than the set value.
Minimum Duration: The duration of the automatically cut trajectory segment is not less than the set value.
4.2 Select by Polygon
- Click
 Draw Polygon button.
Draw Polygon button. - Left click to make an user-defined polygon in the view.
Click
 Select by Polygon button, to select segment in the area of user-defined polygon.
Select by Polygon button, to select segment in the area of user-defined polygon.4.3 Select by Bursh
- Click
 Select on Trajectory button.
Select on Trajectory button. - Left click to select the starting point in the trajectory.
Along the trajectory, select the ending point, the trajectory between the starting point and the ending point will be selected.
4.4 Select by Trajectory Graph
- Click
 Select on Graph button, the trajectory graph will pop up.
Select on Graph button, the trajectory graph will pop up.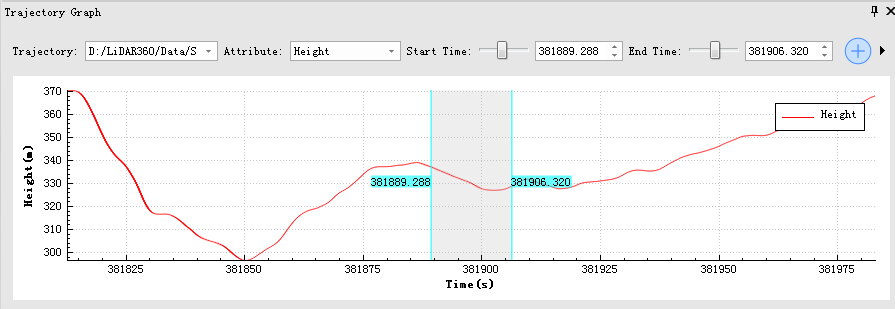
- (Optional) Select an trajectory in trajectory combox, the selcted segment of the trajectory and the trajectory will be shown in the graph.
- (Optional) Select an attribute. Users can select different display mode, including display by height, display by quality factory, display by roll, display by pitch, display by heading and display by velocity.
- Select both Start Time and End Time via scrollbars.
- Click
 to add a new segment.
to add a new segment. (Optional) Change display range. All the trajectory information at any time will be displayed in trajectory graph as a default. Scroll up and down of mouse wheel to zoom in and out the graph, click
 to restore the default display.
to restore the default display.All the selected segment will be shown in Trajectories List Widget.
- Click
- Split Trajectories: Click this button to split the source trajectories by selected segments. New generated trajectories will be stored as POS file format in the workspace and named by the GPS starting and ending times of the trajectory. An example of new file name is "GPSStartTime_GPSEndTime.POS". The effect of cutting is shown as follows.
 Cut Point Cloud Based on Trajectories.
Cut Point Cloud Based on Trajectories.6.1 Click the button to pop up a dialog.
Select the point cloud data files to be cut. Check the “Cut by Trajectories' Buffer”and set the Buffer parameter as desired.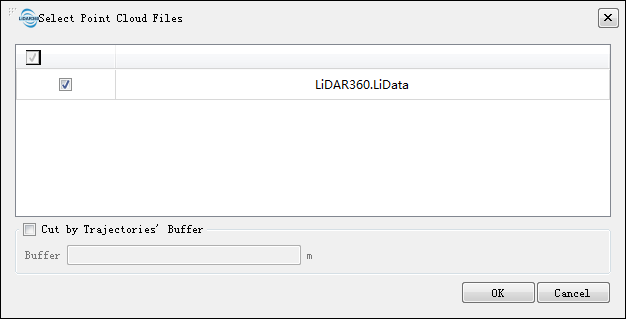
6.2 Click "OK". LiDAR360 will cut the point cloud by the trajectories and show the process speed accordingly. The cutting results will be saved and the name of the point cloud is identical to the corresponding POS file. A dialog pops up to ask the user whether to load the results or not.
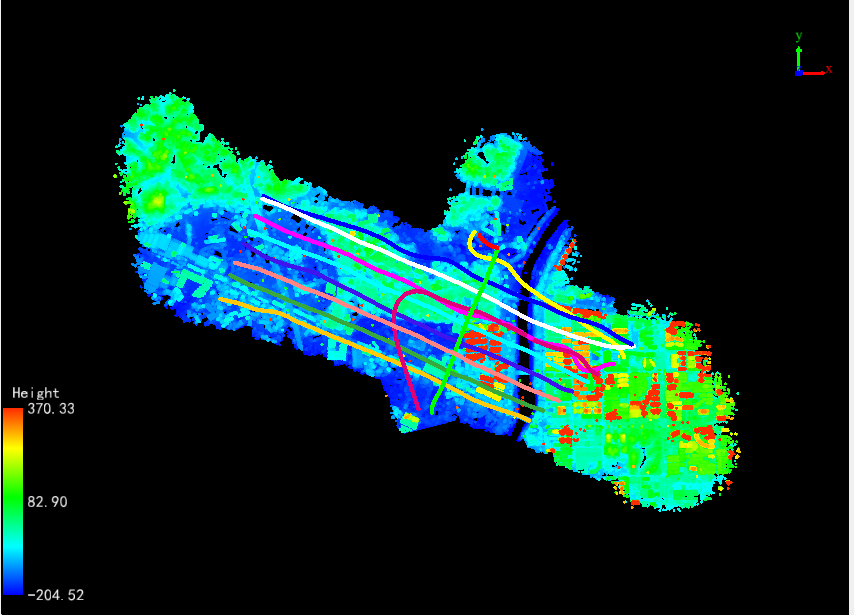
 Match Point Cloud and Trajectory: Click this button, the point cloud data and the corresponding trajectory will be displayed in the same color.
Match Point Cloud and Trajectory: Click this button, the point cloud data and the corresponding trajectory will be displayed in the same color.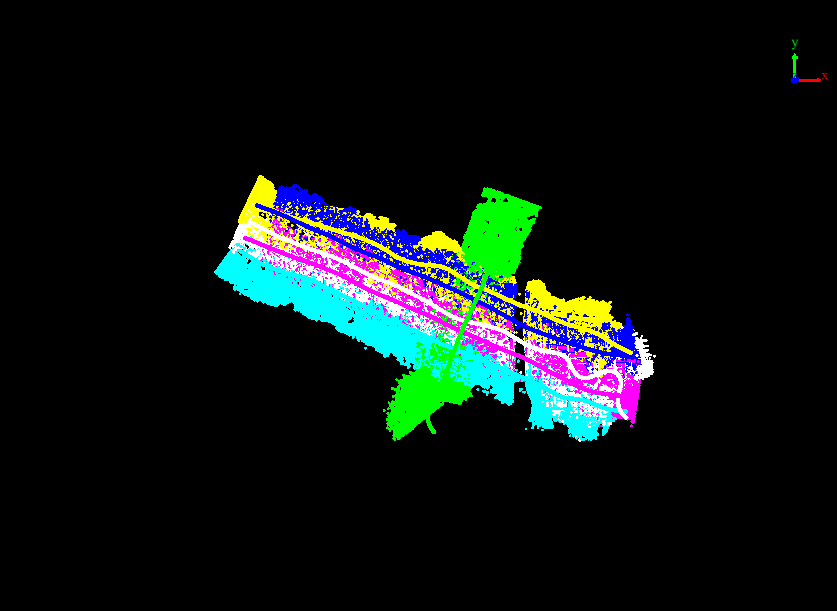
 Calibration: Click this button to pop up a dalog.
Calibration: Click this button to pop up a dalog.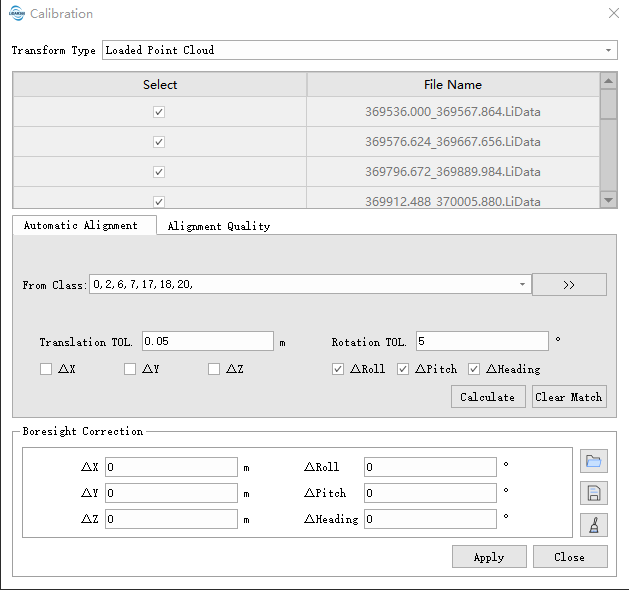
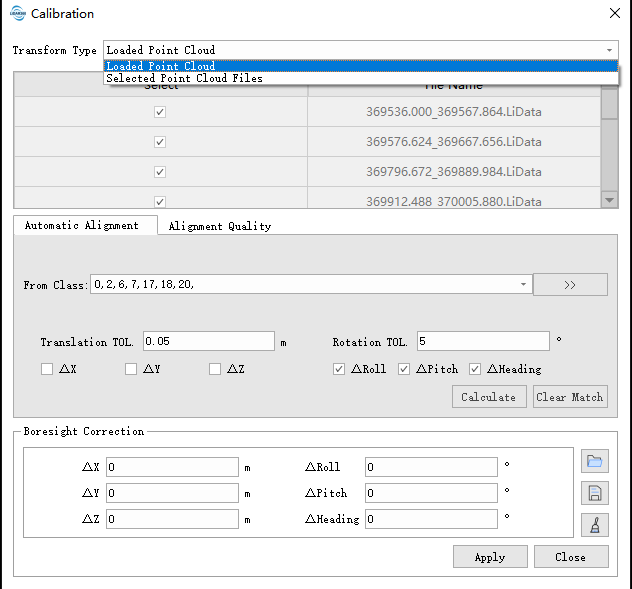
8.1 This function is applied to correct the Boresight Error, which can be calculated automatically (Automatic Alignment) or input manually (Manual Alignment).
Automatic Alignment:Select the boresight error you want to correct, and set the Translation TOL and Rotation TOL. Click "Calculate" to generate the boresight error automatically and the result will be shown in the "Boresight Correction" part of the interface. Click "Clear Matching" to delete the matching information. After modifying relevant parameters, users can calculate the alignment parameters again. After the calculation of automatic alignment, LiDAR360 will figure out the Alignment Quality. The Alignment Quality will be shown in the "Alignment Quality" tab page. Click "Export" button to save the alignment quality information, and Click "Generate Report" button to generate the automatic alignment quality report. (Theory of correction based on automatic adjustment.)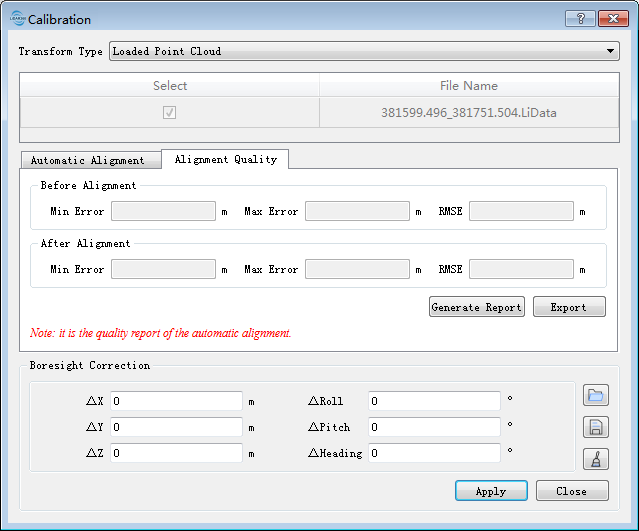 Manual Alignment:Adjust the boresight error manually. (Theory of correction based on manual measurement.)
Manual Alignment:Adjust the boresight error manually. (Theory of correction based on manual measurement.)Click "Apply" and the transformation of error correction will be applied on the selected Transform Type.
8.2 For both automatic and manual method, correction result can be checked in the profile window.
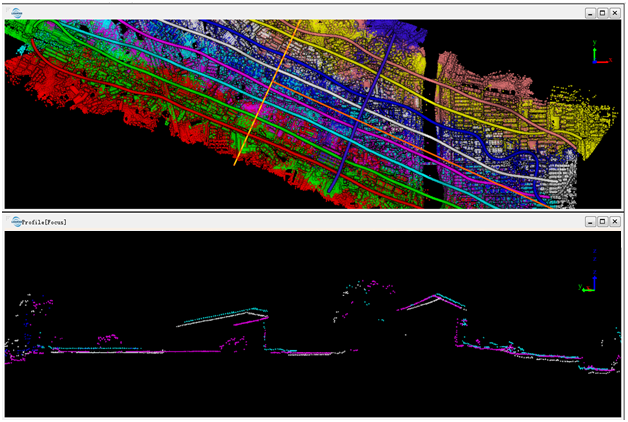 Before transformation
Before transformation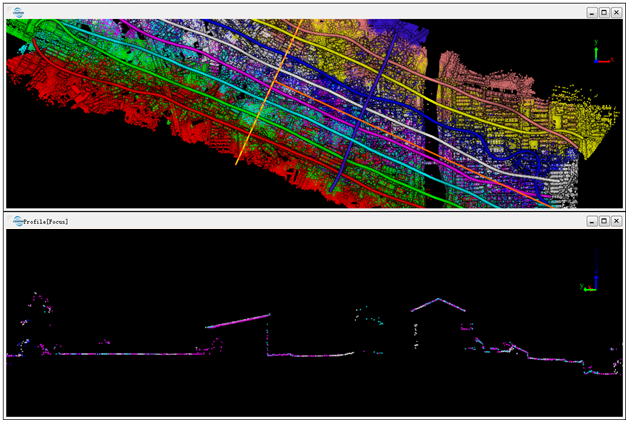 After transformation
After transformation8.3 Buttons on the right of the "Boresight correction" provide the following operations: "loading from file", "saving to a file" and "cleaning".
8.4 If the alignment effect is satisfied, you can switch Transform Type from the "Loaded Point Cloud" to "Selected Point Cloud Files". Click "Apply" to finish the transformation.
 Cut Overlap: Click this button to set the Cut Overlap Parameters. Click "OK" button, then the redundant points between the overlapped trajectories will be classified or deleted.
Cut Overlap: Click this button to set the Cut Overlap Parameters. Click "OK" button, then the redundant points between the overlapped trajectories will be classified or deleted.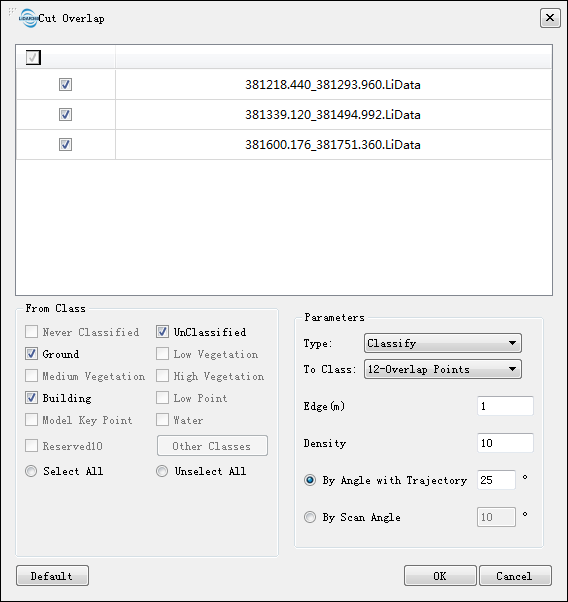
Show Single Trajectory
- Select a trajectory in the Trajectories List Widget, right click to pop up the Context Menu.
- Click the Show Single Trajectory button, the color of the selected trajectory will be changed gradually, and then the trajecotry will twinkle several times.
Delete Trajectories or Segments.
- Select the trajectories or segments in the Trajectories List Widget, right click to pop up the Context Menu.
- Click the Delete button and the selected trajectories and segments will be removed.
Show/Hide Trajectory or Segment Check/Uncheck the checkbox of the trajectory or segment in the Trajectories List Widget will Show/Hide the trajctory or segment.
Trajectory Display the software supports muti-display modes: 13.1 Display by Time(Default)
- Click
 button, the trajectory will be displayed in different color according to acquisition time, users can select the color bar in a pop-up window.
button, the trajectory will be displayed in different color according to acquisition time, users can select the color bar in a pop-up window.
13.2 Display by Height
- Click
 button, the trajectory will be displayed in different color according to height information, users can select the color bar in a pop-up window.
button, the trajectory will be displayed in different color according to height information, users can select the color bar in a pop-up window.
13.3 Display by Quality
- Click
 button, the trajectory will be displayed in different color according to quality information, users can select the color bar in a pop-up window.
button, the trajectory will be displayed in different color according to quality information, users can select the color bar in a pop-up window.
13.4 Display by Specific Color
- Click
 button, the trajectory will be displayed in specific color according to user-defined color, users can select the color in a pop-up window.
button, the trajectory will be displayed in specific color according to user-defined color, users can select the color in a pop-up window.
13.5 Show selected segments
- Check
 button, the unsegmented area will be hide, and only selected segment part will display.
button, the unsegmented area will be hide, and only selected segment part will display.
- Click
Parameters Settings
- Parameters of Cutting point cloud based on Trajectories
- Buffer: The remaining distance in both sides of trajectory while cutting.
- Parameters of Transform
- Boresight Error
- ΔX/ΔY/ΔZ: Correction parameters of boresight offset error.
- ΔRoll/ΔPitch/ΔHeading: Correction parameters of boresight pose error.
- Automatic Alignment: It matches corresponding points between strips automatically and calculates optimal correction value of boresight error via adjustment.
- Translation TOL: The maximum translation tolerance of ΔX, ΔY, ΔZ. The default value is 0.05 m.
- Rotation TOL: The maximum rotation tolerance of ΔRoll, ΔPitch, ΔHeading. The default value is 5°.
- Options: Users can decide whether the 3 translations and 3 rotations are involved in adjustment to calculate correction values. For most aerial data, it is not recommended to correct ΔZ. In default state, all the rotations are selected while all the translations are unselected.
- Alignment Quality: After automatic alignment calculation, LiDAR360 will figure out the alignment quality and show the result in the alignment quality result tab.
- Min Error: Minimum error of matched corresponding points.
- Max Error: Maximum error of matched corresponding points.
- RMSE: RSE error of matched corresponding points.
- Transform Type:
- Loaded Point Cloud: The loaded point cloud which is matched with trajectory in LiDAR360. When the transformation is applied, the corresponding point cloud is modified and the transformation effect can be shown in real-time. When boresight module exits, relevant transformation is eliminated without saving.
- Selected Point Cloud Files: In this type, the file list area on the interface will be activated, users can choose which point cloud file(s) will participate in the transformation. Then the results will be saved to the file. It doesn't loss the information even though the boresight module exits.
- Parameters of Cut Overlap:
- Type:
- Classify: Classify points into target category and save the result in the original point cloud file.
- Delete: Classify points into target category and then delete them from initial point cloud data (Note: If the input point cloud contains points of target category, they will also be removed).
- From Class: Point cloud target category.
- Edge: Grid unit size (length) of overlapping area. This parameter is used to rasterize the point cloud data of the overlapped area.
- Density: Smallest point density of grid unit. If the point density is smaller than the defined threshold, these points will not be classified to redundant points.
- By Angle with Trajectory: Angle between point cloud and trajectory. If this angle is larger than the threshold, the point cloud will be classified to redundant points.
- By Scan Angle: If scanning angle is larger than the threshold, point cloud will be classified to redundant points. (Note: this function can only be used when scanning angle is recorded by point cloud.)
- Type:
Note:1. The matching principle of a point cloud file and a trajectory is that: Each GPS time of all the points in the point cloud is inside the trajectory's GPS time span.2. In most cases, the effect from X,Y or Z is tiny, while the ground control points are needed for higher precision of Z value. Therefore, only Roll, Pitch and Heading are selected to take apart in the adjusting by default.3. The result may not satisfy if accuracy of the POS data file is not enough, and users can make an manual alignment based on the result.4. For Overlapped function, at least two pairs of matched point cloud and trajectories are needed.