Classify Buildings
Summary
This function classifies buildings and walls in point cloud data.
Usage
Click Classify > Classify Buildings
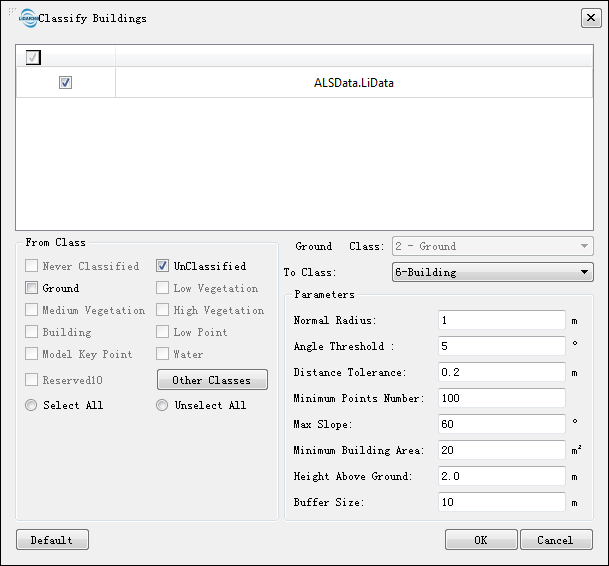
Parameter Settings
- Input Data: The input file can be a single point cloud data file or a point cloud dataset, which must be opened in the LiDAR360 software and has already been classified by ground points.
- From Class: Source class(es).
- Ground Class: The default ground point is 2-class.
- Building Class: Specify the building class number.
- Wall Class: Specify the wall class number.
- Search Radius (default "1"): The radius of the neighborhood used for calculating the point cloud normal vector, typically set to 4-6 times the point spacing.
- Angle Threshold (°) (default "5"): The angle threshold between two points during plane clustering. Points with angles smaller than this value are considered part of the same cluster.
- Distance Tolerance (default "0.2"): The distance threshold from a point to a plane during plane clustering. Points with distances smaller than this value are considered part of the same cluster, generally set to slightly more than the point spacing.
- Min Points Number(default "100"): The minimum number of points required for a building face.
- Max Slope (°) (default "60"): Angles greater than this value are considered not to be building rooftops but potentially walls or other categories.
- Min Building Area (default "20"): The minimum area for a building rooftop. Areas smaller than this value are considered not part of the rooftop.
- Height Above Ground (default "2"): Used for preliminary filtering of rooftop points.
- Buffer Size (default "10 m"): The buffer zone for point cloud segmentation.
- Default: Click this button to restore all parameters to their default values.
Note:
1.This function requires that the point cloud has already undergone ground point classification.2.In the input data, points classified as roof or wall categories will not be reclassified.