Noise Filter
Summary
Remove the outliers from the point cloud data. Different from the remove outliers function, this function has a better processing performance (filters more outliers) on objects with a flat surface (such as walls, interior tunnel walls, and the ground).
Usage
Click Data Management > Point Cloud Tools > Noise Filter.
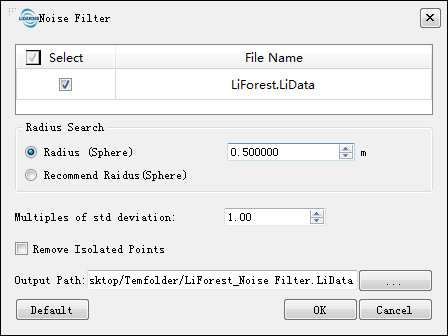
Settings
- Input Data: The input data can be a single point cloud file, or can be a point cloud data collection; these data to be processed must be pre-opened in LiDAR360 software.
- Radius(Default value is “0.5m”): Set the radius of the fitting plane. This function can be used when users know the approximate density of the point cloud data.
- Recommended Radius: Automatically calculate the appropriate searching radius according to the input point cloud data.
- Multiples of std deviation(Default value is “1.0”): Using the relative error (sigma) as a parameter for outliers removal. The algorithm will automatically calculate the standard deviation (stddev) of a point P's surrounding fitting plane. If the distance, d, from this point to that plane is less than sigma * stddev, this point, P, will be kept. The reduction of this relative error results in removing more points. Conversely, more points will be retained. The change of this parameter will not ifnluence the efficiency.
- Remove Isolated Points: The point will be treated as an isolated point when there is less than 4 points within the distance of the searching radius (cannot create a fitting plane with less than 4 points).
- Output Path: The point cloud data will be save at this path after the outliers are removed.