Manual Rotation and Translation
Description
The manual rotation and translation tool supports point cloud and model data types. By rotating and translating the corresponding data in the window, it obtains the corresponding transformation matrix. After applying this transformation, the transformed result data will be obtained.

Tools
In the data registration interface, the buttons from left to right are: Match Data Center, Pause Rotation and Translation, Set Rotation Center, and Reset to Initial State.
The translation and rotation angle information is calculated based on the rotation center, which corresponds to the world coordinates of the geometric center of the bounding box of the data to be registered.
The transformation formula is [X1 Y1 Z1 1] = [X0 Y0 Z0 1]*M /(a03*X0 + a13*Y0 +a23*Z0);
The coordinates after transformation are P1(X1,Y1,Z1).
TX: After checking this item, you can perform translation operations along the X-axis. The translation amount in the X direction will be displayed on delt X.
TY: After checking this item, you can perform translation operations along the Y-axis. The translation amount in the Y direction will be displayed on delt Y.
TZ: After checking this item, you can perform translation operations along the Z-axis. The translation amount in the Z direction will be displayed on delt Z.
Rotate: There are four options: X, Y, Z, and XYZ. If X is selected, rotation operations can only be performed along the X-axis; if Y is selected, rotation operations can only be performed along the Y-axis; if Z is selected, rotation operations can only be performed along the Z-axis; if XYZ is selected, rotation operations can be performed along the X, Y, and Z axes.
Rotate Ball
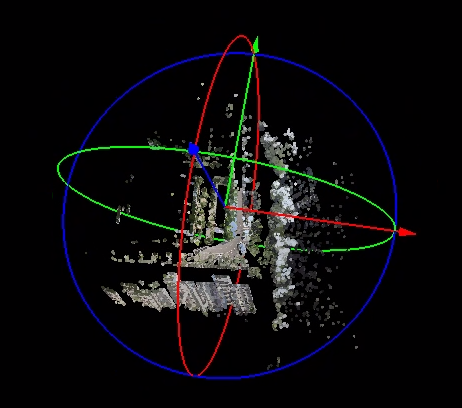
- As shown in the figure, hold the left mouse button and drag the red, green, and blue arrow axes to translate the point cloud along the X, Y, and Z axes, respectively. The dragged axis will be highlighted. Hold the left mouse button and drag the red, green, and blue track circles to rotate the point cloud around the X, Y, and Z axes, respectively. The dragged track circle will be highlighted.