Individual Tree Segmentation and Matching
Functional Overview
When point cloud segmentation is required or the data area requiring fine tree segmentation is large, the point cloud needs to be divided into multiple blocks and distributed to multiple data processing personnel for collaboration. When usingthe block by rangeorblock by polygontool to block point cloud data,it is inevitable that the same tree in the block boundary area will be divided into two or more parts. In order to improve the accuracy of the data after the overall segmentation, buffer parameters are set according to the actual situation of the data during the partitioning. After each piece of data is segmented. You can remove the same tree in the data buffer area of adjacent point clouds.with this function.
Usage
ClickALS Forest > Individual Tree Segmentation and Matching, organize the results after point cloud segmentation.
Parameters Settings
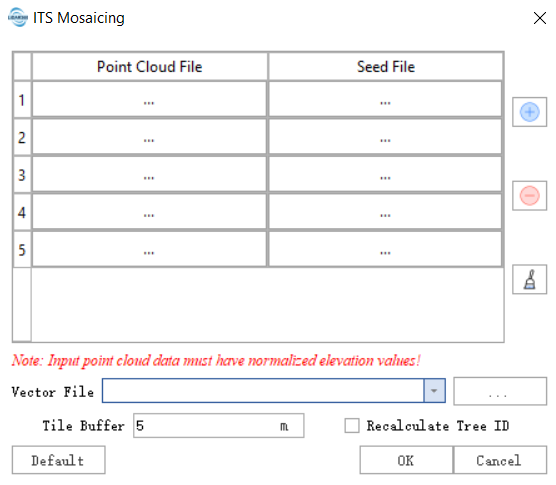
- Buffer: This parameter is used to find the most matched polygon information in vector data for each point cloud data. It needs to ensure that the value is correct; otherwise, the correctness of the result sorting will be affected. This value needsto be the same as the buffer parametersetin the block-by-rangeor block-by-polygon function.
- Input Data: Please ensure that each input point cloud data isis the data after point cloud segmentationortree segmentation based on seed points.
- Point cloud file: Click
 to select the point cloud data to be processed.
to select the point cloud data to be processed. - Seed point file: Clickto select the seed point file corresponding to the point cloud data.
 : Five data can be processed by default. Clickto increase the number of files to be processed.
: Five data can be processed by default. Clickto increase the number of files to be processed. : Deletes the selected point cloud and corresponding seed point files.
: Deletes the selected point cloud and corresponding seed point files. : Deletes the file list.
: Deletes the file list.