CHM Pits Filling
LiDAR canopy height models (CHM) may display unnatural holes or pits, where pixel values are significantly lower than their neighboring pixels. These pits can result from various factors during data acquisition and post-processing. These pits not only affect the visual quality of the CHM images but also impact semi-automated canopy extraction and lead to significant errors in biomass estimation. Therefore, it is necessary to effectively fill these pits in the CHM images.
Principle Description
CHM pit filling uses the algorithm by Ben-Arie et al., 2009, to identify and fill pits in CHM images. While filling the pits, the values of non-pit areas remain unchanged.
- Apply a Laplacian filter to the original CHM image to obtain the Laplacian edge detection image.
- Apply a median filter to the original CHM image.
- Construct a cumulative histogram of the Laplacian edge detection image and apply algorithm parameters to segment the histogram. Use the threshold value from the segmentation to binarize the Laplacian image. Values below the threshold are set to 0, and values above the threshold are identified as pits.
- For all pit locations, extract pixel values from the median filtered image to fill the pits.
The threshold parameter for cumulative histogram segmentation generally ranges from 1% to 30%. The final threshold parameter can be determined by adjusting the parameter and previewing the pit filling effect.
Usage
In the toolbox, click Airborne Forestry > Individual Tree Segmentation > CHM Pit Filling.
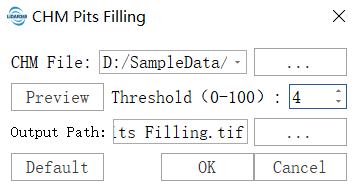
Parameter Settings
- CHM File: When there is CHM data in the view, it will be automatically added. It can also be added from the dialog box. Refer to Canopy Height Model for the method of generating CHM.
- Threshold: The parameter for segmenting the cumulative histogram of the Laplacian edge detection image. The pixel value corresponding to this threshold is used to binarize the Laplacian edge detection image. This value typically ranges from 1% to 30%, with a default value of 3%.
- Output Path: The path for the pit-filled CHM image. The output image format is TIF.
- Default: Click this button to restore the default value of 3%.
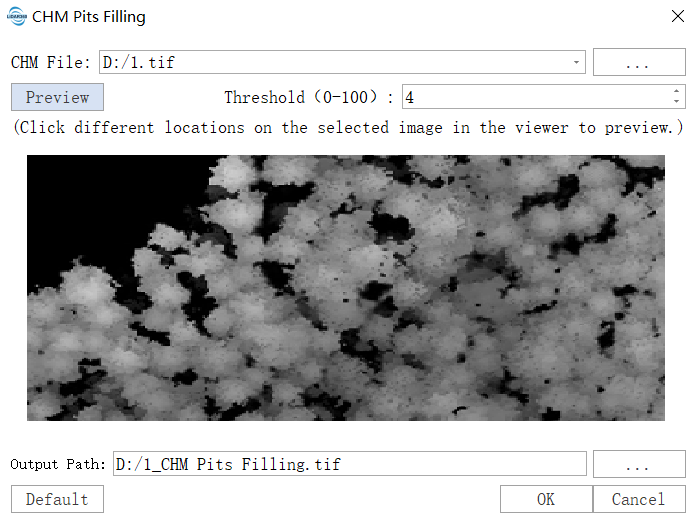
Preview
Due to the varying distribution and size of pits in different CHM images, the local preview function can be used to check the applicability of the current threshold parameter. During the preview, adjust the parameter and click different areas in the view to check the pit filling effect. If the threshold parameter shows good filling effects across different areas, it can be used as the final threshold parameter to perform pit filling on the entire CHM image.
Click the Preview button in the dialog box to start the preview function. In the view, click on the image to be pit-filled, and the dialog box will display a 512x512 pixel area around the clicked location with the pit-filling effect. The preview image can be moved and zoomed to check the pit-filling effect.
Note:
1. The input CHM image should be a single-channel image.2. CHM pit filling can be performed repeatedly. Pit-filled images can be filled again if needed.
Ben-Arie J R, Hay G J, Powers R P, et al. Development of a pit filling algorithm for LiDAR canopy height models[J]. Computers & Geosciences, 2009(9). DOI:10.1016/J.CAGEO.2009.02.003.he applicability of the current threshold parameter. During preview, adjust the parameter and click different areas in the view to check the pit filling effect. If the threshold parameter works well for different areas, it can be used as the final threshold parameter to perform pit filling on the entire CHM image.
Click the Preview button in the dialog box to start the preview function. In the view, click on the image to be filled with pits, and the dialog box will display the pit-filled effect image within a 512*512 pixel range around the clicked area. You can move and zoom the preview image to check the pit filling effect.
Note:
1. The input CHM image should be a single-channel image.2. CHM pit filling can be performed repeatedly. You can fill pits again on the pit-filled image.
Ben-Arie, J. R., Hay, G. J., Powers, R. P., et al. (2009). Development of a pit filling algorithm for LiDAR canopy height models. *Computers & Geosciences*. DOI: [10.1016/J.CAGEO.2009.02.003](https://doi.org/10.1016/J.CAGEO.2009.02.003).