ICP Registration
Summary
By setting benchmark point cloud and point cloud to be registered, perform the point cloud registration through ICP (Iterative Closest Points) algorithm. The basic steps of this algorithm are shown as follow.
Supposing that there are two given 3D-point collections, X1 and X2, the steps of ICP registration are shown as follows:
Step 1. For each point in X2, calculate and find its closest point in X1;
Step 2. Estimate the combination of rotation and translation using a root mean square point to point distance metric minimization technique which will best align each source point to its match found in the previous step.
Step 3. Transform X2 using the obtained transformation.
Step 4. Iterate the above steps until the average distance from X2 to X1 is less than a given threshold.
After entering the Registration Tool, click the "ICP Registration" button to enter the ICP Registration Tool, and the ICP Toolbar will pop up. If there is no reference file, a dialog box will appear for selecting a reference file.
Setting
Parameter Settings
- Select Class: Choose the initial category for the point cloud ICP registration. By default, all categories are selected.
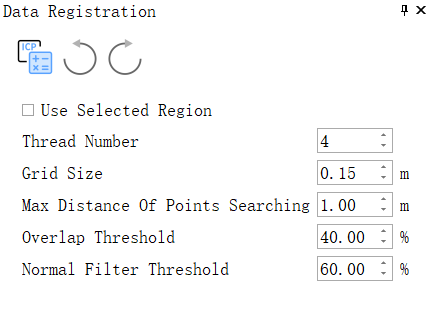
- Use Selected Region: You can use the selection tools on the page, such as the polygon cut tool
 , to select the overlapping region of the point cloud. Check the Use Selected Area option to use the overlapping area for registration. If unchecked, the global point cloud will be used for registration. It is recommended to check this option.
, to select the overlapping region of the point cloud. Check the Use Selected Area option to use the overlapping area for registration. If unchecked, the global point cloud will be used for registration. It is recommended to check this option. - Registration Type: Includes two types: point-to-point and point-to-plane. The former estimates the transformation parameters by minimizing the Euclidean distance between matching points, while the latter solves for the optimal transformation matrix by minimizing the normal (plane) distance between source and target points. If the point cloud data contains ground, walls, or other planar features, the latter should be prioritized.
- Number of Iterations (default is "10"): The algorithm supports multi-threaded accelerated computation. If the parameter value exceeds the maximum number of threads of the computer, the algorithm will use the maximum number of threads by default.
- Sample Point Limit (default is 100,000): This parameter is used for downsampling the original data. The algorithm will randomly sample the original point cloud data to the specified number of points, obtaining a subset of the original point cloud. The subsequent registration process will be based on this subset.
- Max Distance of Points Searching (default is 1m): This parameter is used for nearest neighbor search to construct matching pairs. When coarse registration accuracy is low, for example, if the distance between two walls exceeds 5 meters after coarse registration, and the maximum point search distance is set to 1 meter, the algorithm will fail to associate features of the two walls, resulting in matching errors. In this case, increase the maximum point search distance, for example, to 10 meters, and run a global optimization. This will bring the point clouds closer, but local details may not be well stitched. Then set the maximum point search distance to 1 meter for global optimization. Generally, running the optimization 2-3 times is recommended to achieve good stitching results.
- Overlap Threshold (default is 40%): This parameter is used for deciding which stations to include in the adjustment network during the inter-station nearest neighbor search. It works in conjunction with the maximum inter-station search distance. When the distance between two stations is less than the maximum inter-station search distance, the overlap rate between the two station point clouds must also meet the requirement. If the overlap rate exceeds the set overlap threshold, these two stations will be included in the adjustment network.
- Normal Filter Threshold (default is 60%): This parameter is used for filtering the extracted line and plane features. The algorithm will retain features based on this parameter's proportion for computation. The larger the parameter, the more features will participate in the calculation, resulting in better optimization effects but longer computation times. It is recommended to set this parameter above 50%.
Note:
1. This function does not support model-to-model registration.
2. If the files to be registered and the reference files are far apart in position, coarse registration (rotation and translation registration, and point-to-point registration) should be performed first.