Query Dip and Strike
Summary
This tool is used to calculate dip and strike automatically or based on the point cloud selected manually. Related analysis tool and result report are also available.
Usage
Load the point cloud in the viewer. Click Geological Analysis > Query Dip and Strike, and the toolbar will show in the viewer.
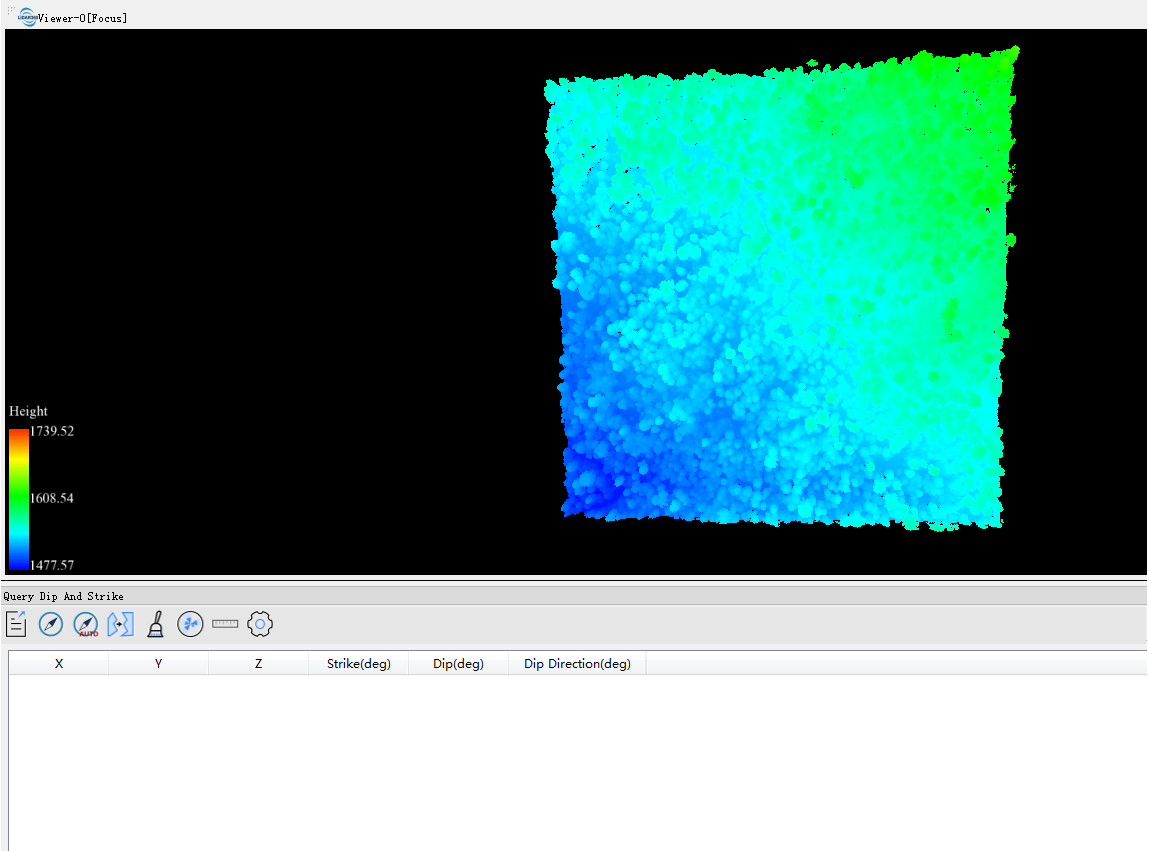

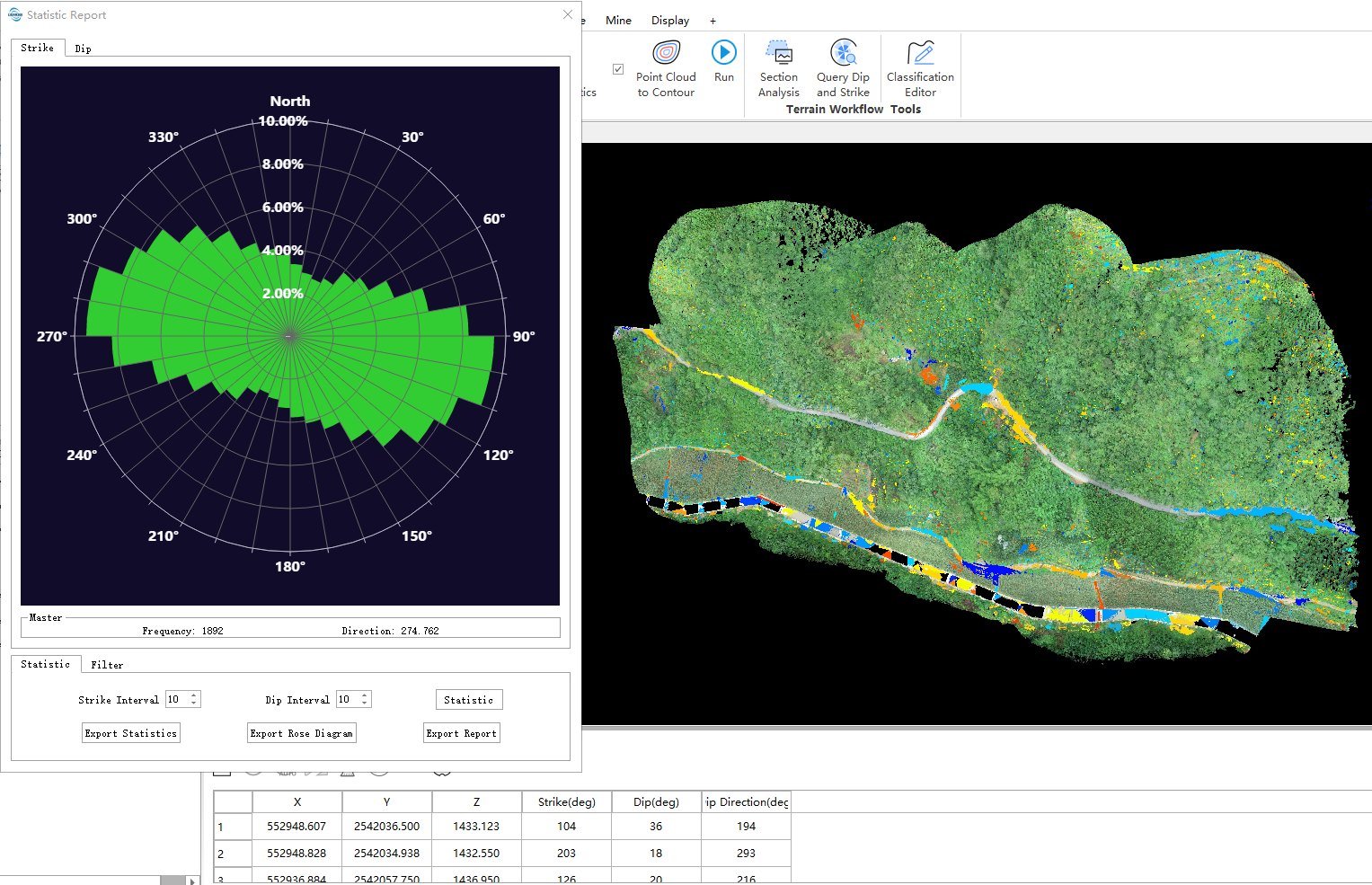
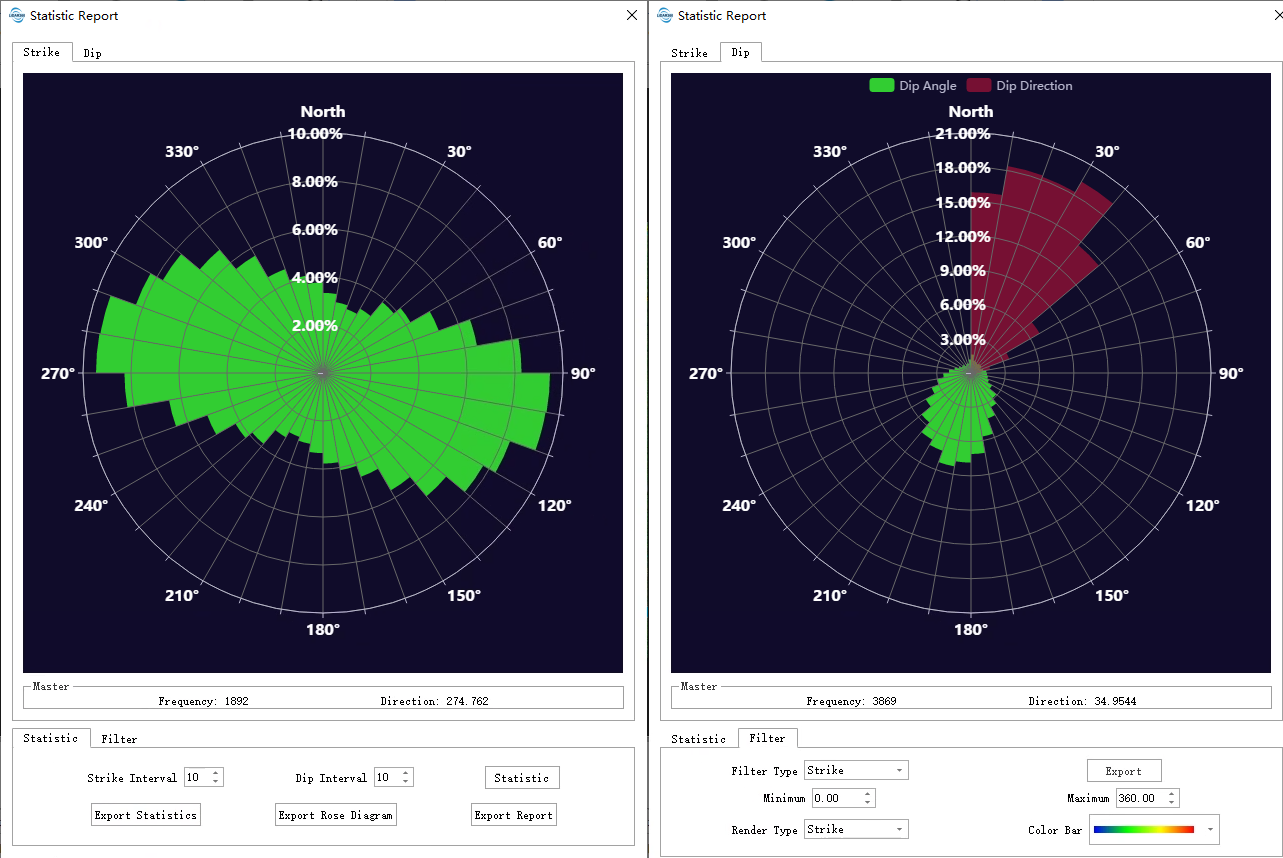
In the Query Dip and Strike window, there are several buttons: Export Data, Query Dip and Strike, Automatically Query Dip and Strike, Clear data, Statistic Report,Adjust radius and Settings.
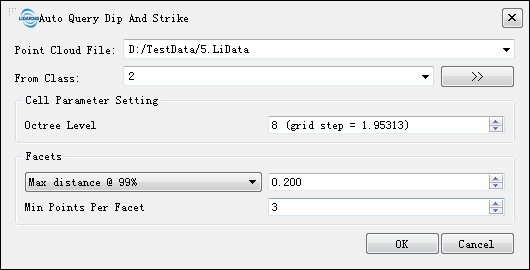
- Point Cloud File:Select point cloud file in the drop-down list.
- From Class:Select the class of point cloud to be calculated, default setting is ground point.
- Cell Size:Create an octree for the point cloud. The higher the level, the fewer the number of point clouds contained in each octree node. The specific results of the segmentation are as follows: the larger the value is set, the finer the queried facet, otherwise the larger the facet.
- Facets:Parameters of Facets.
- Facets Type:Different type of Facets.
- Max Root mean square error:The maximum root mean square of the distance between the point cloud of the cluster and the fitted plane in the segmentation.
- Max distance@68%:The maximum distance of the top 68% of the distance between the point cloud of the cluster in the segmentation and the fitted plane.
- Max distance@95%:The maximum distance of the top 95% of the distance between the point cloud of the cluster in the segmentation and the fitted plane.
- Max distance@99%(by default):The maximum distance of the top 99% of the distance between the point cloud of the cluster in the segmentation and the fitted plane.
- Max distance: The maximum distance between the point cloud of the cluster in the segmentation and the fitted plane.
- Distance Threshold: The larger the threshold, the more points will be segmented into a facet, which means there will be more large facets.
- Min Points Per Facet:The minimum points of a facet. The larger the value, the more the points of a facet.
- Convex Hull: Uses the Convex Hull as the shape of each generated structural surface.
- Concave Hull: Uses the Concave Hull as the shape of each generated structural surface.
- Facets Type:Different type of Facets.