Classify Ground Points by CSF
Functional Overview
Ground point classification is the basic operation of point cloud data processing. This function adoptsGround Point Filtering Algorithm Based on Cloth Simulation(Cloth Simulation Filter, IPTD(Zhang et al.,2016)).
This algorithm can be divided into the following steps:
- Invert the Z direction of the point cloud. The point cloud is divided into a grid with a certain resolution in the XY direction, and the nodes of the grid are used as a simulated cloth.
- Set the initial height of the cloth to the point cloud maximum and start the iteration. During each iteration, the cloth will "sink" to the point cloud with a certain gravity, and the positional relationship between the cloth nodes and the point cloud is calculated at the same time. Nodes that have landed on the point cloud will not be movable during the next iteration. An immovable node will slow the sinking of surrounding nodes according to the stiffness value r.
- After a certain number of iterations, calculate the positional relationship between each point and the cloth; points whose distance from the cloth in the Z direction is less than a certain threshold will be classified into target categories.
Usage
ClickClassification > Classify Ground Points by CSF.
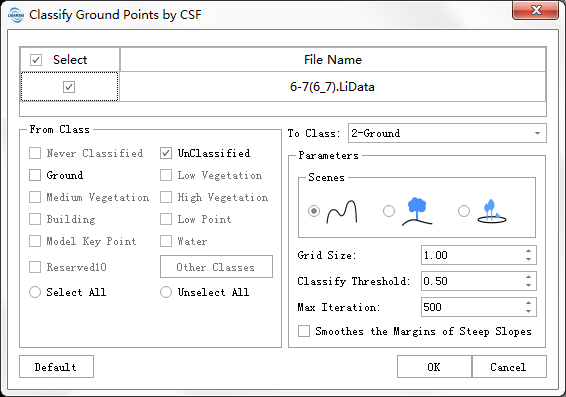
Parameters Settings
- Input Data: The input file can be a single data file or a point cloud data set; the file(s) to be processed must be opened in the LiDAR360 software.
- From Class: Categories to be classified.
- To Class: Classification target category.
- Scene: There are three types of scenes: steep slope, gentle slope and flat ground.
- Grid Size (meters) (default "1.0"): The resolution of the cloth nodes. 1.0 is suitable for most point clouds. For data with large terrain fluctuations, this value can be appropriately reduced.
- Classify Threshold (meters) (default "0.5"): After the iteration is complete, the points whose distance from the cloth in the Z direction is less than this threshold will be classified into the target category.
- Max Iteration (default "500"): The algorithm completes the iteration when it reaches the maximum number of iterations or when all cloth nodes are immovable.
- Smoothes the Margins of Steep Slopes: When the cloth is located on a steep slope, due to the internal constraints between the cloth nodes, it cannot fit the ground well, and the algorithm may generate large errors. Checking this option can eliminate the effects of steep slopes to a certain extent. If the scene does not contain steep slopes, you can uncheck it.
@inproceedings{
author={Zhang W, Qi J, Wan P, Wang H, Xie D, Wang X, Yan G},
title={An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation.},
booktitle={Remote Sensing. 8(6):501.},
year={2016}
}