Subsampling
Summary
Subsampling point clouds, namely, reducing the number of point clouds, LiDAR360 offers three methods for resampling: minimum point spacing, sampling rate, and octree.
Usage
Click Data Management > Point Cloud Tools > Subsampling
Settings
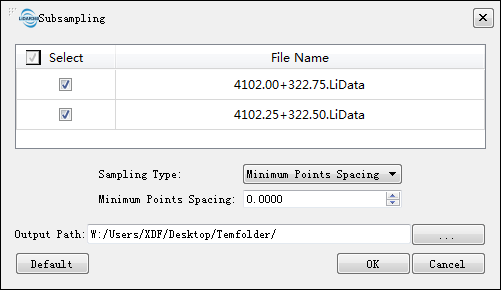
- Input Data: The input file can be a single point cloud data file or multiple data files. File Format: *.LiData.
Sampling Type: This parameter defines the resampling method.
- Minimum Points Spacing (default, default value is "0.0000"): Users need to set a minimum point spacing between two points so that the minimum three-dimensional distance between any two points in the sampled point cloud will not be less than this value. The larger the value is set, the fewer points will be kept.
- Sampling Rate (default value is "99.99%"): Users need to set the percentage of reserved points. In this mode, LiDAR360 will randomly retain the specified number of points. Reserved Points = Total Number of Points * Sample Rate. The value of this parameter ranges from 0 to 100%. The smaller the value is set, the fewer points will be kept.
- Octree (default value is "21"): This method allows users to select an "octree" subdivision level and build 3D voxels for the input point cloud. Only the point closest to each voxel center will be retained. The "octree" subdivision level ranges from 1 to 21. The smaller the value is set, the fewer points will be kept.
Output path: Path of the output file. New file will be generated after the function being executed.