Classify Model Key Points
Functional Overview
This function can thin a certain level of the classified points. It is generally used to generate a sparse point set that retains the key points in the complex terrain area and thin the points in the flat area from the extracted dense ground points.
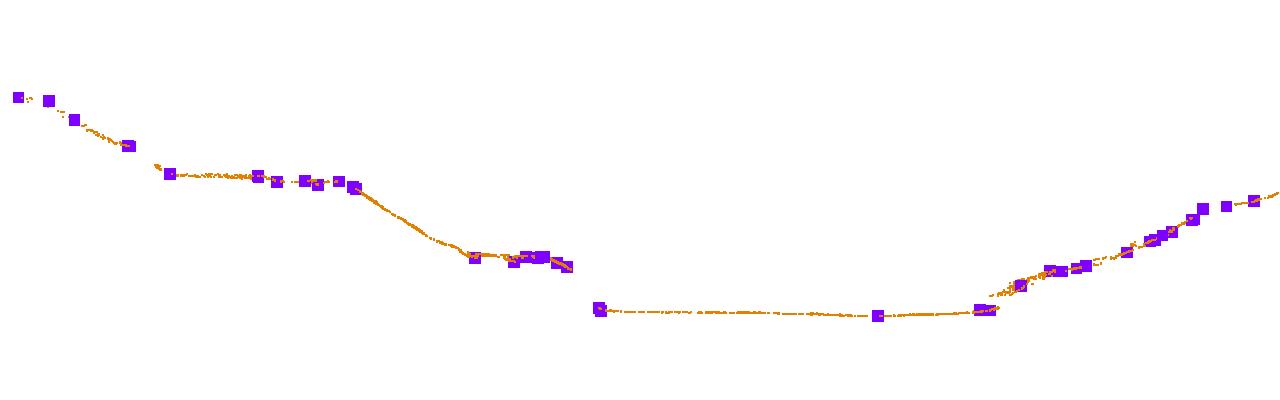
The idea of the algorithm is: first, meshing of point cloud data, and then use the seed points in the grid to establish the initial triangulation network. According to the upper and lower boundary thresholds, the points that meet the conditions are added to the triangulation network. The process is iterated until all of the key points of terrain model are classified. In the following figure, the yellow point is the ground point and the purple point is the key point of terrain model.
Usage
ClickClassify > Model Key Points.
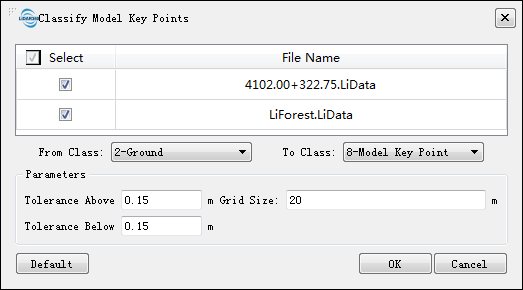
Parameters Settings
- Input data: The input file can be a single data file or a point cloud data set; the file(s) to be processed must be opened in the LiDAR360 software.
- Original category: Categories to be classified.
- Target category: Classification target category.
- Tolerance Above (m, default value is"0.15"): The maximum allowable elevation tolerance value on the triangulation network model composed of original points. If it exceeds this threshold, it is regarded as the key point. Simply saying, the larger the value is set, the more sparse the extracted key points of the model will be; otherwise, the denser it will be.
- Tolerance Below (m, default value is"0.15"): Maximum allowable elevation tolerance in the triangulation network model composed of original points. If it exceeds this threshold, it is regarded as the key point. Simply put, the larger the value is set, the more sparse the extracted key points of the model will be; otherwise, the denser it will be.
- Grid Size (m, default value is"20"): The value is used to ensure the density of key points extracted from the model. For example, if you want to ensure that there is at least one point in the grid every 20 meters, this value is set to 20.
- Default Value: Click this tool option to restore all default parameters.