Segment by Attribute
Functional Overview
This function first extracts the point clouds of interest through attribute filtering and category filtering, then uses Euclidean clustering to segment the point clouds of interest into several clusters, further filters these clusters, and finally counts the information of these clusters and outputs a statistical report. This function does not generate new point cloud files but writes the labels of the clusters into an additional attribute named "Group" in the point cloud (this additional attribute is an integer single component that cannot be defined as other types or components). Point clouds with identical labels greater than 0 are considered as belonging to the same cluster, such as 1, 2...; -1 is an invalid label indicating that this point does not belong to any cluster. Users can further process the point clouds of interest through Extract by Attribute, Classify by Attribute or Extract by Group. This function generates a CSV format statistical report. Each row in this report represents a cluster, and users can freely choose which statistics information they want.
Usage
Click Data Management > Point Cloud Tools > Cluster by Attribute
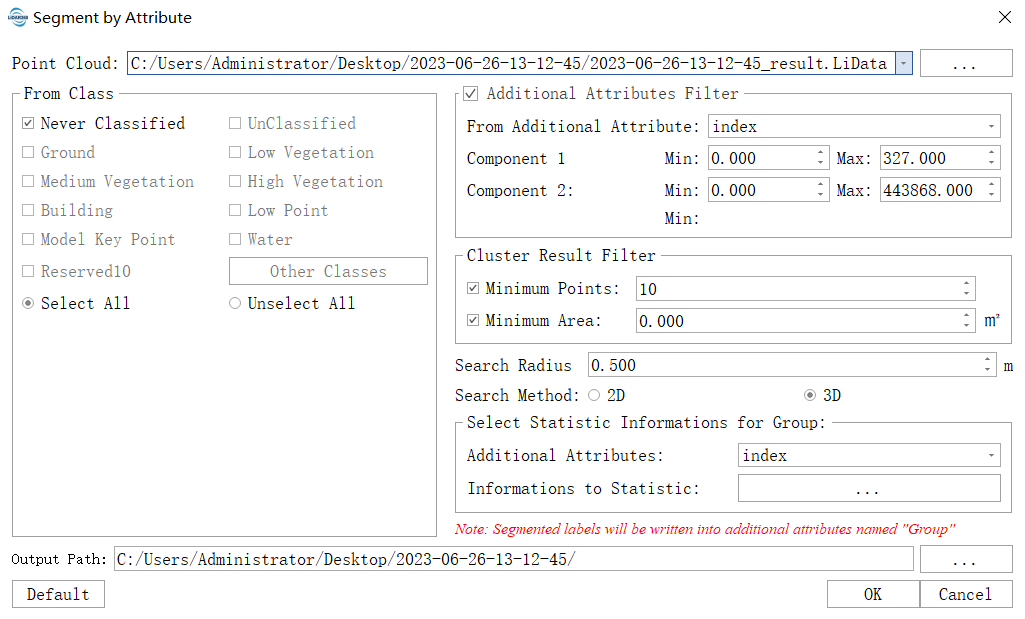
Parameter Settings
- Point Cloud : The input file must be a single LiData point cloud data file. Users can select already opened LiDAR360 software's point cloud data or open other LiData files from disk.
- From Class: Initial categories are used to extract interested category points.
- Additional Attributes Filter: Used for extracting interested range within additional attributes. Refer to Extract by Additional Attributes. If not selected, this filtering will not be performed.
- Cluster Result Filter:
- Minimum Point (default is "10"): If checked, the following filter will be performed: if the number of points in a cluster is less than this value, the cluster will be classified as an invalid cluster and its label will be set to -1.
- Minimum Area (default is "0"): If checked, the following filter will be performed: if the projection area of a cluster is less than this value, it will be considered as an invalid cluster and its label set to -1.
- Search Radius (default is "0.5"): Euclidean clustering threshold. Point clouds with Euclidean distance smaller than this threshold are grouped into one cluster. The calculation of Euclidean distance depends on search method. The larger this value, the fewer clusters you get.
- Search Method: Dimension used for calculating Euclidean distances between point clouds during clustering process; currently supports 2D and 3D. When Search Method is “2D”, only horizontal direction's euclidean distance would be considered during clustering process.
- 3D (Default): Calculation formula for Euclidean distance: d =√(x0-x1)²+(y0-y1)²+(z0-z1)²
- 2D: Calculation formula for Euclidean distance: d =√(x0-x1)²+(y0-y1)²
- Select Statistic Informations for Group (checked by default):If checked,add statistics about certain additional attributes in output CSV report。
- Additional Attributes :Select name of additional attribute,refer to Extract by Additional Attributes.
- Informations to Statistic :Choose one or more items from name, convex hull area, point cloud number, position, AABB bounding box, minimum value, maximum value, average value and standard deviation for statistics. Name,convex hull area,point cloud number,position and AABB bounding box are required.
- Default: Set parameters to default values.
- Output Path: Output path of CSV statistical report.