Point Cloud Segmentation
Function Overview
Unlike the top-down segmentation method for airborne LiDAR point clouds, terrestrial LiDAR point clouds are typically obtained from below the canopy. This allows for clear identification of tree trunks and segmentation of individual trees, as described by Tao et al. (2015). In this case, the diameter at breast height (DBH) of individual trees can be measured.
Usage
Click TLS Forestry > Point Cloud Segmentation.
Parameters
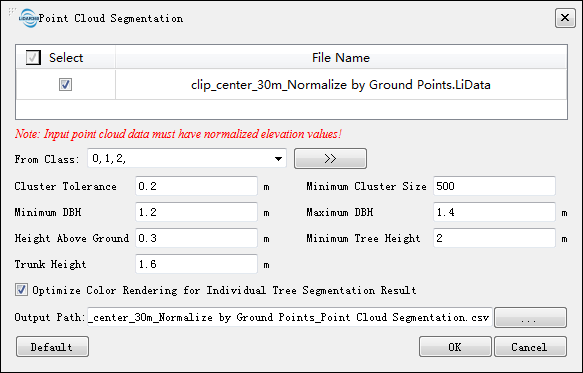
- Input Data: The input data must be normalized point cloud data. For normalization methods, refer to Normalization or Normalization by Ground Points. Input files can be a single point cloud data file or a point cloud dataset; the data to be processed must be opened in the LiDAR360 software.
- From Class: The starting class for point cloud segmentation. By default, all classes are selected.
- Clustering Threshold (meters) (default: "0.2"): This parameter allows users to control the efficiency and accuracy of individual tree segmentation. It controls the detection of individual trees and the growth of the tree canopy point cloud. A larger clustering threshold increases segmentation efficiency but may negatively affect segmentation results if set too high.
- Minimum Clustering Size (default: "500"): This value mainly affects the growth of the tree canopy point cloud. Smaller values improve segmentation results but slow down the process; larger values have the opposite effect.
- Height Above Ground Points (meters) (default: "0.3"): Only point clouds above this value are included in individual tree segmentation. This parameter helps reduce the impact of ground point cloud thickness or vegetation on segmentation results. Setting this value too high may affect the accuracy of detecting tree diameters.
- Minimum Tree Height (meters) (default: "2"): This parameter can be adjusted based on local tree growth conditions to filter out small trees.
- Trunk Height (meters) (default: "1.6"): The algorithm will segment point clouds within the range from Height Above Ground Points to Tree Trunk Height to detect the tree trunk, serving as the starting point for tree growth. It is recommended to set this parameter at the branch-free height.
- Optimize Coloring Rendering for Segmentation Results (default selected): By rearranging the ID information after individual tree segmentation, this option helps resolve issues with adjacent trees being assigned the same color.
- Output File Type: Choose the type of output file. Options include CSV table files and tree attribute files.
- Output Path: After running, each point cloud data will generate corresponding segmentation results. The results are either comma-separated CSV files or tree attribute files, containing tree ID, x, y coordinates, tree height, DBH, crown diameter, crown area, and crown volume attributes. For the file format, refer to Ground-based Point Cloud Individual Tree Segmentation Result File Format. For viewing segmentation results, refer to Viewing Point Cloud Segmentation Results.
- Default: Reset parameters to default values.
@inproceedings{ author={Tao S L, Wu F F, Guo Q H, Wang Y C, Li W K, Xue B L, Hu X Y, Li P, Tian D, Li C, Yao H, Li Y M, Xu G C and Fang J Y}, title={Segmentation tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories}, booktitle={ISPRS Journal of Photogrammetry and Remote Sensing, 110:66-76}, year={2015} }