Classify Ground Points
Summary
Ground points classification is an important operation of point cloud preprocessing, which can be implemented in LiDAR360 with an improved progressive TIN densification filtering algorithm (Zhao et al.,2016).
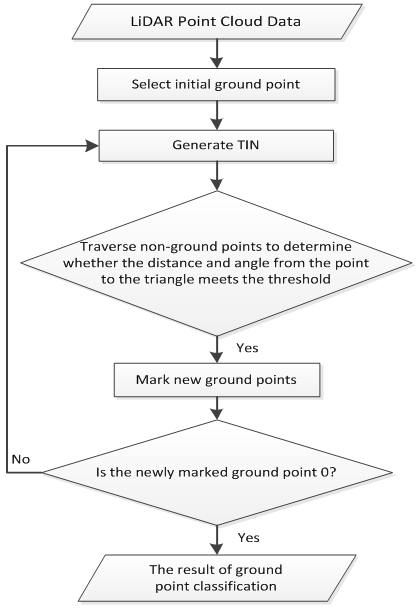
The algorithm first generates a sparse triangulated irregular network(TIN) through seed points, and then iteratively processes layer-by-layer densification until all ground points have been classified. The specific steps of the algorithm are described as follows:
- The initial seed point selection. If the point cloud contains buildings, the maximum building size is taken as the grid size to grid the point cloud, and for the point cloud without the building, the default value is used as the grid size. Take the lowest point in the grid as the starting seed point.
- Build a TIN. The initial TIN was constructed using the initial seed point.
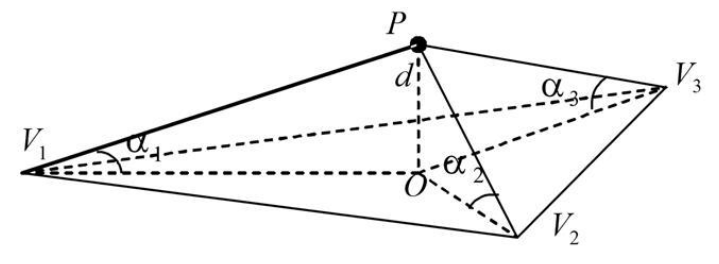
- Iterative densification process. Traverse all the unclassified points, query the triangles that each point belongs to in the horizontal projection plane; Calculate the distance(d) from the point to the triangle and the max angle between the point and three vertices with the triangles plane. As shown in the figure below, the distance and max angle are compared with the Iteration distance and Iteration angle, separately. If it is less than the corresponding threshold, then the point is classified as a ground point and added to the triangulation. Repeat this process until all ground points have been classified.
The flow of algorithm is shown in the figure.
Usage
Click Classify > Classify Ground Points
Settings
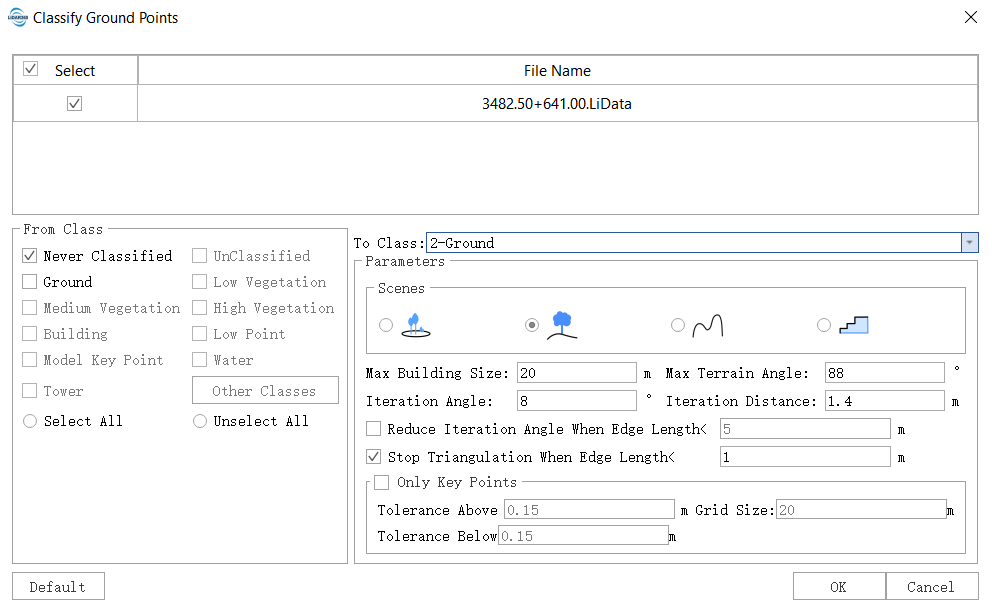
- Input Data: The input file can be a single point cloud data or a point cloud dataset, which must be opened in the LiDAR360 software.
- From Class: Source class(es).
- To Class: Target class.
- Scenario (optional): For different terrain scenarios, you can choose flat terrain, gentle slope terrain, steep slope terrain, and mountain terrain. Check different terrain features, corresponding to different default parameters.
- Max Building Size (m, default value is "20"): The maximum length of the building edge that exists in the point cloud scan. If this parameter is set too small, the flat roof of the building may be mistaken for the terrain. When there is a building in the point cloud data, the maximum building size can be measured by using the Length Measurement in the menu bar. The value of this parameter should be greater than the measured value. For point cloud data without buildings, this parameter can use the default value of 20m.
- Max Terrain Angle (°, default value is "88"): The maximum slope of the terrain shown in the point cloud. This parameter can determine whether the points nearby the ground points belong to the ground or not. Usually, the parameter can be set as default.
- Iteration Angle (°, default value is "8"): The allowable range of angles between unclassified points and ground points. The area with large topographic relief can be appropriately set larger and adjusted accordingly with the iteration distance. Generally, it is set to 6 to 12 degrees.
- Iteration Distance (m, default value is "1.4"): Distance threshold between the unclassified points and the triangle in the triangle mesh. When the terrain undulations are large, it can be appropriately enlarged and adjusted accordingly to the iteration angle, which is generally set at 1.2-1.6 meters.
- Reduce Iteration Angle When Edge Length < (m, default value is "5", Optional): When the triangle length of the points to be classified is smaller than the threshold, the iteration angle should be decreased. If this parameter is checked, it means that when the triangle side length of the point to be classified in the triangulation network is less than the threshold value, the iteration Angle can be reduced accordingly to obtain smoother ground points. When a sparse ground point needs to be obtained, the threshold may be increased accordingly.
- Stop Triangulation When Edge Length < (m, default value is "2", Optional): When the triangle length of the point to be classified corresponds to the length of the triangle is less than the threshold, the densification of triangulation network is stopped. This value can prevent the locally generated ground point from being too dense. When this value increase, the ground points will be sparse, and vice versa.
- Only Key Points (Optional): On the basis of ground point filtering, the key points of the model are further extracted as the ground point category, which can preserve the key points on the terrain and comparatively extract the points in the gentle ground area. For the specific usage of this function, please seeClassify Model Key Points.
Note: Because the actual terrain is complex and changeable, when using this function to perform ground point classification, different parameters needs to be adjusted in order to achieve relatively ideal results. In addition, the classification result in local area can be reclassified by Classify Ground by Selected and the Classify by Interactive Editing tool.
@inproceedings{
author={Zhao X Q, Guo Q H, Su Y J and Xue B L},
title={Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas},
booktitle={ISPRS Journal of Photogrammetry and Remote Sensing,117:79-91},
year={2016}
}