Point Cloud Segmentation
Summary
The point cloud segmentation algorithm determines the position, tree height, crown diameter, crown area, and crown volume of individual tree by analyzing the elevation values of points and their distances from other points.
Principle Description
Li et(Li et al.,2012) developed a point cloud segmentation algorithm that separates individual trees from the point cloud one by one. The algorithm works as follows:
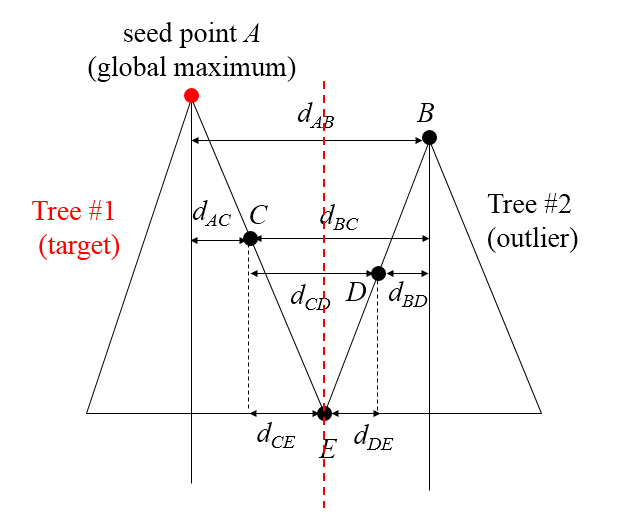
Starting with seed point A (global maximum), this algorithm estimates lower points based on critical spacing and minimum spacing rules to develop a tree cluster from seed point A. For example, if point A is the highest point, it is considered as the top (target) of Tree 1. Then classify all points below A successively. First, Point B is classified as Tree 2 because dAB > a set critical value (this parameter is determined by users). Then we set Point C whose distance dAC is less than the critical value. By comparing with Points A and B, Point C's category was set to Tree 1 because dAC < dBC. Comparing with Points B and C classifies Point D into Tree 2; comparing with Points C and D classifies Point E into Tree 2. The critical value should be equal to the canopy radius. When the critical value is too large or too small, under-segmentation or over-segmentation may occur.
Usage
Navigate to and click on TLS Forest > Point Cloud Segmentation.
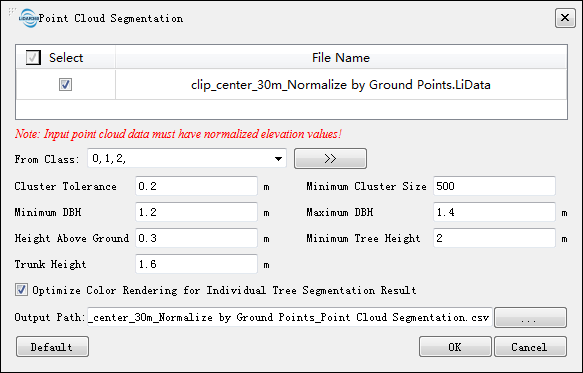
Settings
- Input Data: Ensure that each input point cloud data is Normalize by DEM or Normalize by Ground Points.
- From Class: Class involved in point cloud segmentation, with default selection of all categories contained in the point cloud data.
- Grid Size (m) (default: "0.6"): Grid resolution parameter used to identify tree positions, generally set to one-fifth of the average crown diameter; this parameter usually ranges from 0.3~0.6 meters.
- Buffer Size (pix) (default: "50"): When the length and width range of the segmented data exceeds 1500*grid size, block processing will be performed, and this value is the buffer threshold for blocking, measured in pixels. It can be set as maximum crown diameter divided by raster resolution.
- Minimum Tree Height (m) (default: "0"): Minimum tree height threshold for segmenting individual trees; those below this value will be segmented into individual trees.
- Height Above Ground (m)(Default:"2"):Points lower than this threshold are considered not part of a tree and are ignored during segmentation process.
- Gaussian Smoothing:Whether to perform Gaussian smoothing; it is recommended to select Gaussian smoothing option to remove noise interference.
- Sigma(Default:"1"):Gaussian smoothing factor; higher values result in smoother results while lower values lead to less smoothness. Smoothness affects number of trees segmented out; if under-segmentation occurs, reduce Sigma value(e.g., 0.5), otherwise increase Sigma value(e.g.,1.5); in addition to the Gaussian smoothing factor, CHM segmentation results are also affected by CHM resolution. To adjust CHM resolution, DEM and DSM resolutions need to be adjusted.
- Radius (pix) (default: "5"): Window size used for Gaussian smoothing; this value is odd and can generally be set to the average crown diameter.
- Optimize Color Rendering for Individual Tree Segmentation Result(Default Selected):By rearranging ID information after tree segmentation, it can greatly solve the problem of adjacent trees being assigned with same color.
- Output File Type: Select output file type including CSV table files and tree attribute files.
- Output Path: Output path where each point cloud data will generate corresponding segmentation result; the result is a comma-separated CSV table or tree attribute file containing attributes such as Tree ID, x,y coordinates, tree height,crown diameter,crown area,and crown volume; refer to Point Cloud Segmentation Result File Format in Appendix for details on format.
- DefaultValue: Reset each parameter to the default value.
@inproceedings{
author={Tao S L, Wu F F, Guo Q H, Wang Y C, Li W K, Xue B L, Hu X Y, Li P, Tian D, Li C,Yao H, Li Y M, Xu G C and Fang J Y},
title={Segmentation tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories},
booktitle={ISPRS Journal of Photogrammetry and Remote Sensing,110:66-76},
year={2015}
}