Rectify
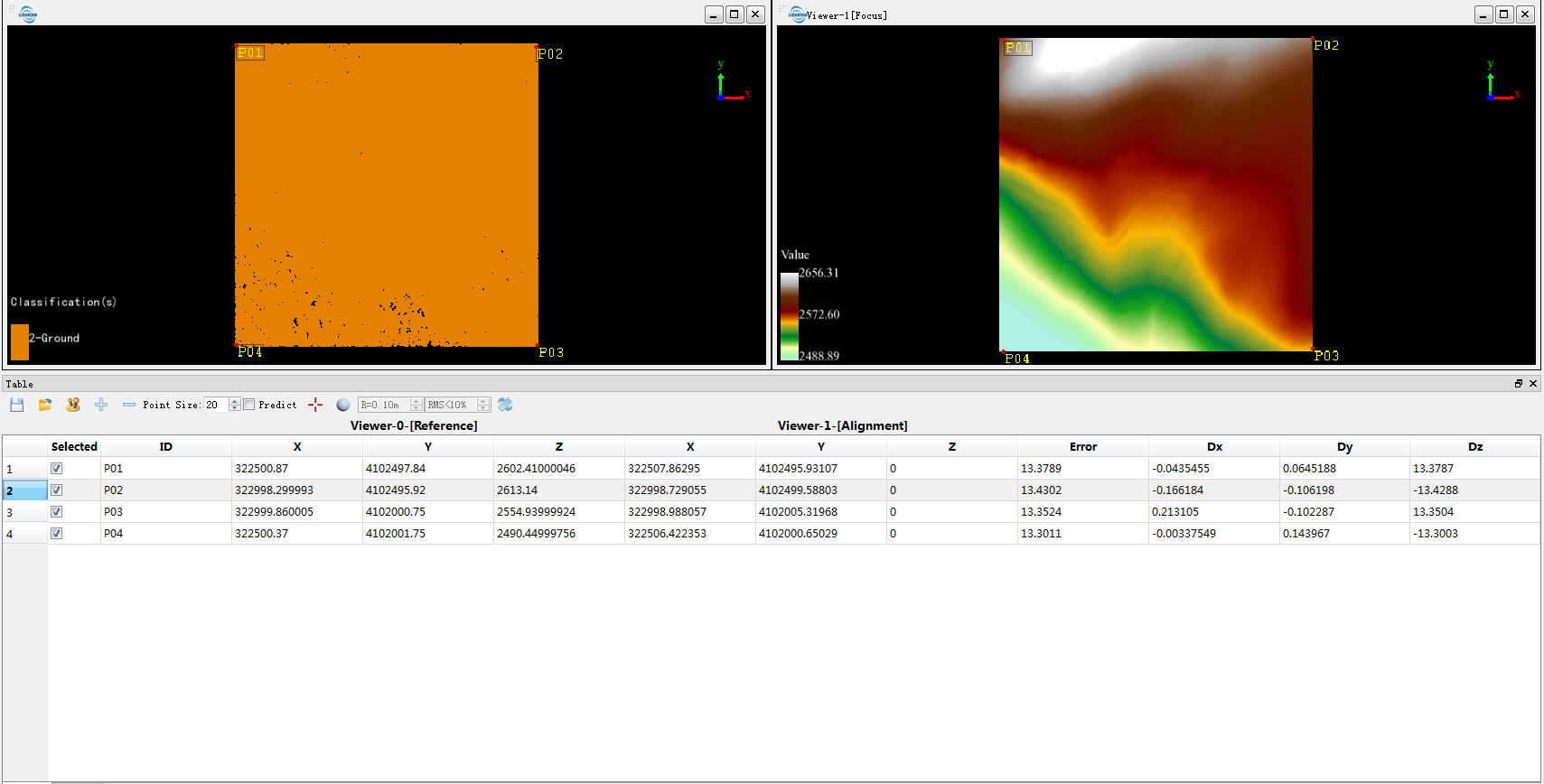
Brief: This tool is used for coordinate rectification of to-be-aligned data with respect to reference data. The two datasets can be "point cloud and point cloud", "point cloud and image", or "image and image". At least 3 pairs of homologous points(or fitted spheres in point cloud) should be added in the datasets, which are displayed in separate windows, before the calculation of transformation parameters. You can evaluate the accuracy using the residuals of homologous points listed in the table window.
Usage
Click Plugins > Rectify
Note: You have to create at least two display windows (except the profile window) before using this tool.
Steps
Create two display windows and load the reference data and the to-be-aligned data into separate windows. Click the Rectify tool to open the following dialog.
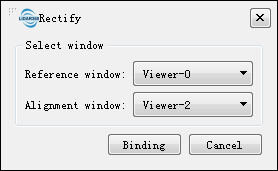
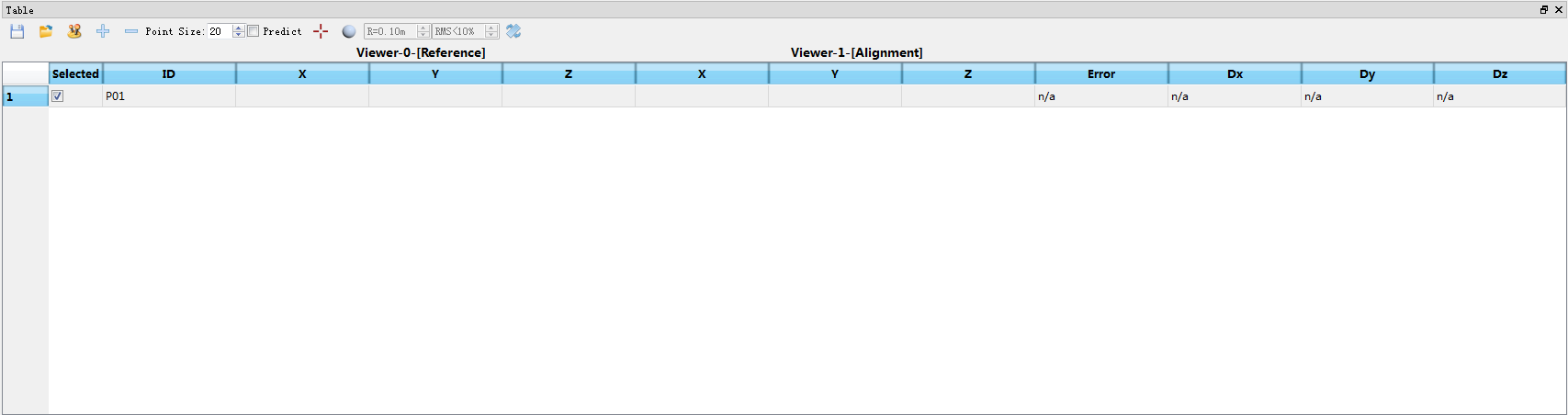
Select Reference window for the reference data and Alignment window for the to-be-aligned data. Then click the Binding button. The following table window with a series of tools pops up.
(Optional) Click the Change Datum button to exchange the reference window and alignment window, if they were mistaken.
(Optional) Click the Load Data button to load homologous points from existing file. Then you can skip the manual measurement (steps 5, 6, 7).
Click Pick Point or Pick Registration Sphere to measure a pair of homologous points (or fit a pair of spheres) in reference window and alignment window. If spheres are fitted, their centers are used as homologous points.
Click the button Add Point to add blank row for a new pair of homologous points.
Repeat steps 5 and 6 to pick at least three pairs of homologous points (or spheres).
(Optional) If the option Predict is checked and there exist at least 3 pairs of homologous points, the corresponding position in the reference window will be predicted after picking a point in the alignment window.
(Optional) The user can exclude a pair of homologous points in the calculation of transformation parameters: (1) Uncheck the row of the homologous points in the table; (2) Or click the Delete Point button after selecting the corresponding row.
(Optional) The user can modify the coordinates of added homologous points: (1) Pick point again in the alignment window and reference window after selecting a row of homologous points; (2) Or double click the coordinates in a row, then input new values directly.
(Optional) The user can view each homologous point quickly for quality check: Double click a row in the table to jump to the corresponding positions in the display windows.
(Optional) Click the Save Data button to save the homologous points to file.
Click the button Transform to calculate transformation parameters and generate aligned data.
Toolbar

Following functions are integrated in the toolbar.
Point Size (Default: "20"): Point size of homologous points in display windows.
Predict (Default: Unchecked): If this option is checked and there exist at least 3 pairs of homologous points, the corresponding position in the reference window will be predicted after picking a point in the alignment window.
R: Radius for sphere fitting. Please input the actual radius of target ball.
RMS: The threshold of root mean square error for sphere fitting. Please set larger value for point cloud of low quality in case of fitting failure.
| Polynomial Correction | Condition |
|---|---|
| Primary Polynomial | 3 <= N < 6 |
| Quadratic Polynomial | 6 <= N < 10 |
| Cubic Polynomial | 10 <= N |