Noise Filter
Brief
Remove noise from a point cloud. Unlike the denoising function, this function works better for objects with planar surfaces (e.g., walls, tunnel interiors, ground) and can filter out more noise points.
Usage
Click Plugins > Point Cloud Tools > Noise Filter
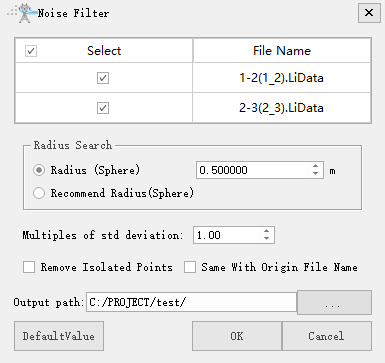
Parameter Settings
- Input Data: The input file can be a single point cloud data file or a point cloud dataset.
- Radius Search (meters) (default is "0.5"): Set the radius for fitting the plane. This method can be used when the user knows the approximate density of the point cloud.
- Recommended Radius Search: Automatically calculate a suitable search radius based on the input point cloud.
- Standard Deviation Multiplier (default is 1.0): Use the relative error (sigma) as the denoising criterion. The program automatically calculates the standard deviation (stddev) of the plane fitted to the neighborhood of each point P. If the distance d from the point to the plane is less than sigma*stddev, the point P will be retained. Decreasing this value will result in more points being removed, and vice versa. Changing this value does not affect efficiency.
- Remove Isolated Points: If the number of points within the search radius is less than four (insufficient for plane fitting), the point is considered isolated. Users can choose whether to remove such points based on this parameter.
- Same With Source File Name: If checked, a new file with the same name as the source file but with noise removed will be generated in the output directory. Otherwise, the string "_NoiseFilter" will be appended to the source file name.
- Output Path: The output folder path. After the algorithm is executed, a new file with noise removed will be generated in this directory.
- DefaultValue: If this button is clicked, all parameters will be set to default values.