Transformation
Brief
LiPowerline software supports multiple coordinate conversion methods. Users can select a conversion type to perform point cloud data conversion according to their needs.
The four supported coordinate conversion methods are:
Steps
- Input Data: The input file can be a single point cloud data file or multiple data files. File Format: *.LiData.
- Select the Transformation Type. The user selects the desired conversion type from the drop-down box and sets the relevant parameters.
- Output path: Path of the output folder. After the algorithm is executed, new files after transformation will be generated.
Usage
Click Data Management > Point Cloud Tools > Transformation
Settings
Linear
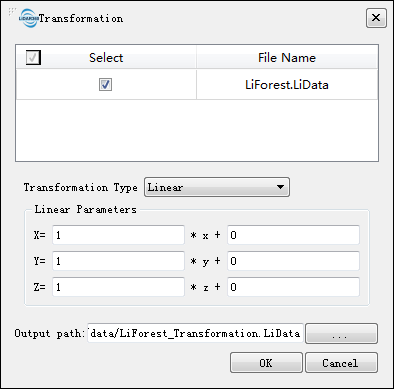
The linear transformation is used to pan and zoom a point cloud. A panning and scaling parameter need to be set to the X, Y, Z coordinates, respectively. The targeted coordinates are calculated using the following formula:
Among them: Sx, Sy, Sz are the scaling factors for the x, y, and z coordinates. Px, Py, and Pz are the panning parameters for the x, y, and z coordinates. x, y, and z are the original coordinates, and X, Y, and Z are coordinates obtained after the linear transformation.
XYMultiply
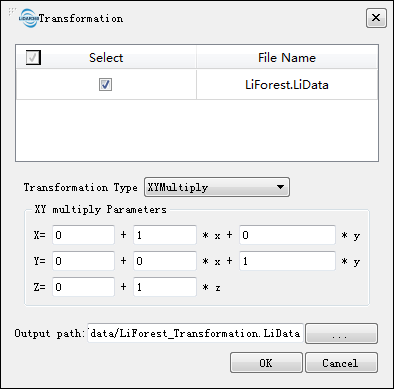
The target coordinates are calculated using the following formula:
Among them, Px, Py, Pz, a, b, c, d, e are the transformation parameters, Sx, Sy, Sz are the original coordinates, and X, Y, Z are the transformed coordinates. This is often used as a 2D Helmert transformation.
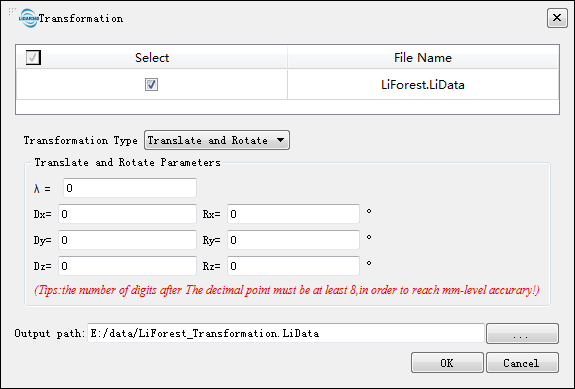
Translate and Rotate
The target coordinates are calculated using the following formula:
R11, R12, R13, R21, R22, R23, R31, R32, R33 are calculated as follows:
R11 = cos( Ry ) * cos( Rz )
R21 = cos( Ry ) * sin( Rz )
R31 = -sin( Ry )
R12 = sin( Rx ) sin( Ry ) cos( Rz ) - cos( Rx ) * sin( Rz )
R22 = sin( Rx ) sin( Ry ) sin( Rz ) + cos( Rx ) * cos( Rz )
R32 = sin( Rx ) * cos( Ry )
R13 = cos( Rx ) sin( Ry ) cos( R_z ) + sin( Rx ) * sin( Rz )
R23 = cos( Rx ) sin( Ry ) sin( Rz ) - sin( Rx ) * cos( Rz )
R33 = cos( Rx )* cos( Ry )
- λ (default value is "0"): Scale conversion factor applied to X, Y, Z.
- Dx, Dy, Dz (default value is "0"): Panning values added to X, Y, Z.
- Rx, Ry, Rz (default value is "0"): The angle of rotation about the X, Y, and Z axes in degrees.
Note: To achieve millimeter-level accuracy, there should be at least eight decimal places after the decimal point.
3D Affine
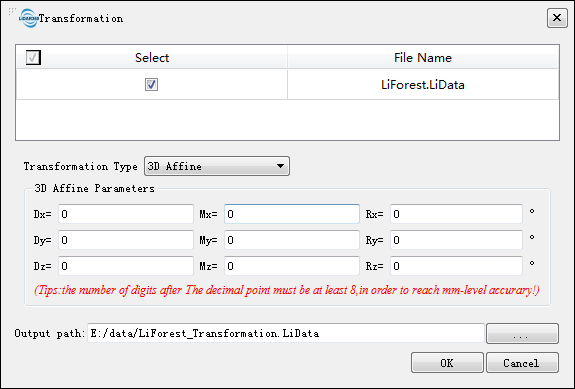
The target coordinates are calculated using the following formula:
- Dx, Dy, Dz (default value is "0"): Panning values added to X, Y, Z.
- Mx, My, Mz (default value is "0"): Scale factor applied to the X, Y, and Z axes.
- Rx, Ry, Rz (default value is "0"): The angle of rotation about the X, Y, and Z axes in degrees.
Note: To achieve millimeter-level accuracy, there should be at least eight decimal places in the user inputs.