Outlier Removal
Brief
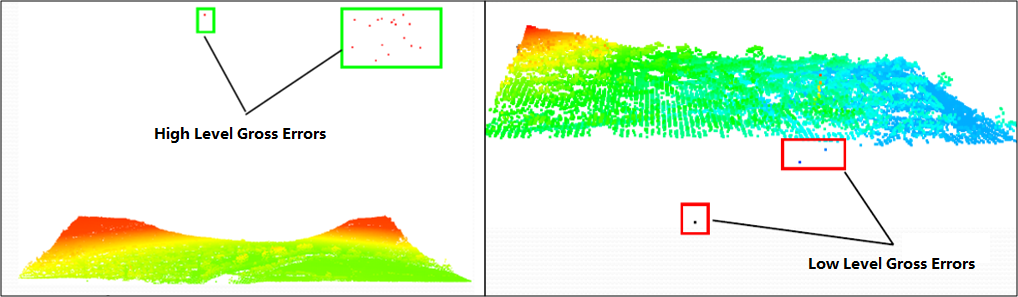
Common noises include high level gross errors and low level gross errors. As shown below, high level gross error is usually caused by the returns of high-flying objects (such as birds or aircraft) during the process of data collection; low-level gross error are returns with extremely low attitudes caused by the multipath effect of a laser pulse. The Outlier Removal tool aims to remove these errors as much as possible and therefore improve the data quality.
The algorithm will first search for each point's neighboring points within a user-defined area and calculate the average distance from the point to its neighboring points. Then, the mean and standard deviation of these average distances for all points are calculated. If the average distance of a point to its neighbors is larger than maximum distance (maximum distance = mean + n * standard deviation, where n is a user-defined multiple number), it will be considered as an outlier and be removed from the original point cloud.
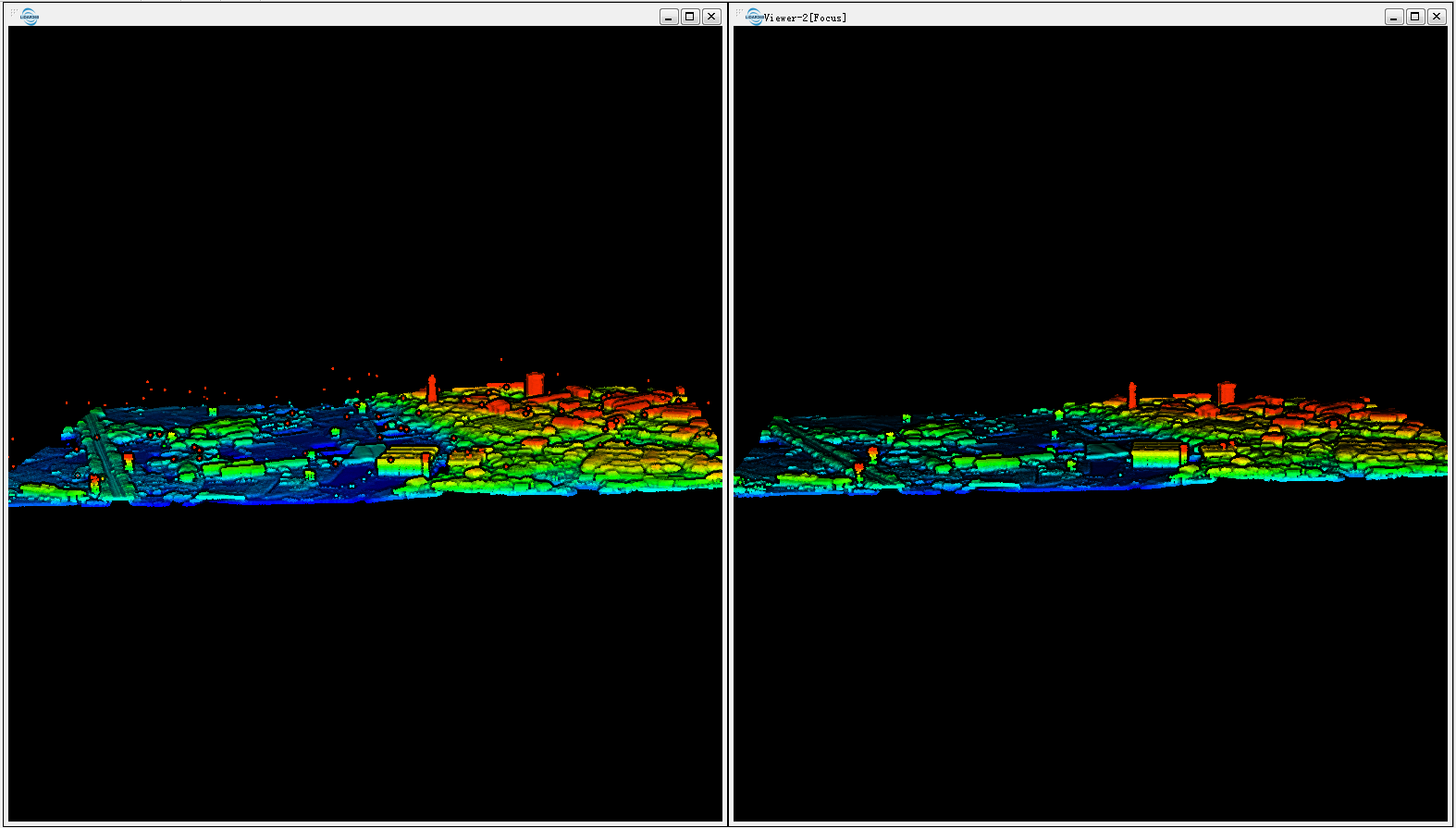
Effect picture:
Usage
Click Data Management > Point Cloud Tools > Outlier Removal
Settings
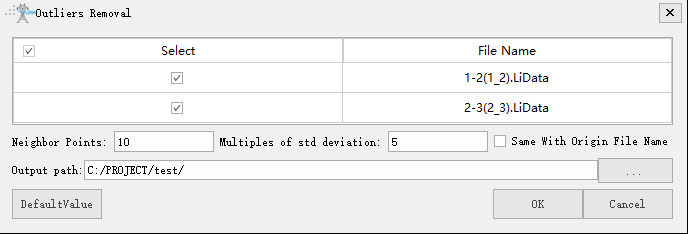
- Input Data: The input file can be a single point cloud data file or multiple data files. File Format: *.LiData.
- Neighbor Points (default value is "10"): The number of points required in the neighborhood to calculate the average distance of each point. If there are not enough points found, the algorithm will not be executed.
- Multiples of std deviation (default value is "5"): The factor multiplied by the standard deviation to calculate the maximum distance.
- Same With Origin File Name: Whether to use the same file name of origin file name.
- Output path: Path of the output file. After the algorithm being executed, a new file will be generated. When more than one files are entered, the path needs to be set to a folder.
- DefaultValue: If this button is clicked, all parameters will be set to default values.
Note: The algorithm can be performed repeatedly to improve the denoising results. The outlier removal results is limited if the noises are to dense.