Strip Alignment in LiDAR360
Introduction
Airborne LiDAR system is influenced by various error sources. The boresight error between laser scanner coordinate system and GNSS/INS coordinate system is the largest systematic error source of airborne LiDAR. A system boresight error contains roll, pitch, and heading errors.
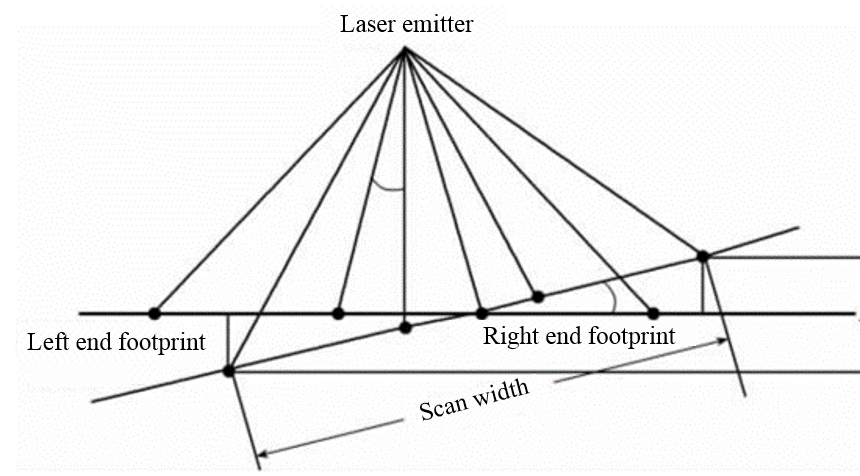
Roll Error
The effect of error in the roll angle is shown in the following figure. The planar position of scanned objects will be shifted along scanlines (perpendicular to flight direction) when there is an error in the roll angle.
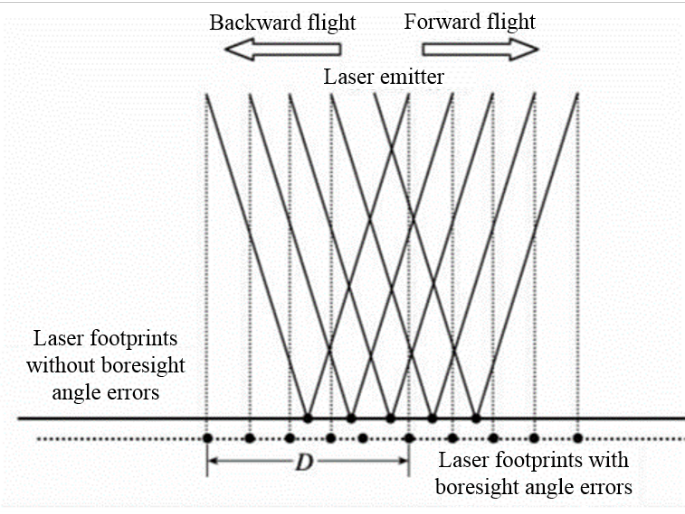
Pitch Error
The position of scanned object is shifted along scanline due to Pitch angle error. The following figure shows the effect of pitch error on laser footprints.
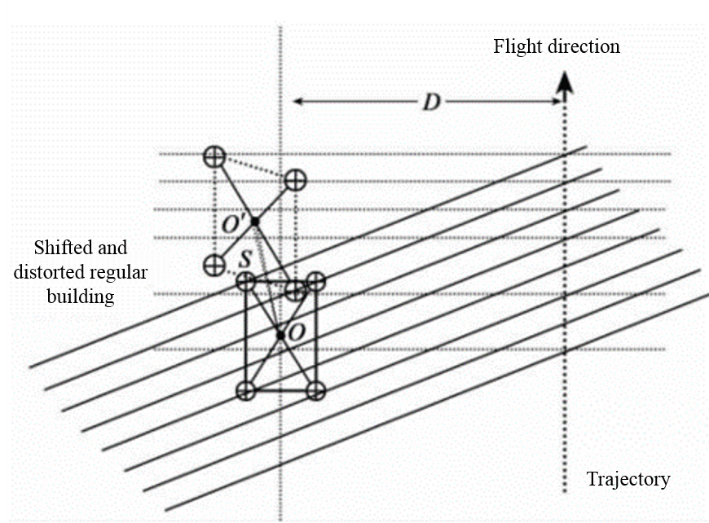
Heading Error
Error in the heading angle leads to the shifting and distortion of LiDAR point cloud objects. The following figure shows the erroneous positioning and form of an object affected by error in the heading angle.
The process of Strip Alignment eliminates the boresight error and improves the data quality and accuracy of a point cloud dataset by calculating boresight error parameters. LiDAR360’s Strip Alignment Tool can calculate boresight errors and contains Automatic or Manual Correction approaches to determine parameters needed to remove the error from input point cloud datasets collected from mobile laser scanning systems. In this tutorial, we will introduce the Strip Alignment with Automatic Correction workflow. The LiDAR360 User Manual should be referred to when using the Manual Correction features of the Strip Alignment Tool experienced users.
Software requirement
Please download the latest version of LiDAR360 from the GreenValley International official website, and install and activate following instructions in the User Guide.
Sample data
The Sample Data folder provides sample datasets for the following exercises:
- Trajectory.pos
- StripAlignmentSampleData.LiData