Projections, Transformations, and Registration in LiAir, LiBackpack, and LiDAR360
Knowing the coordinate systems of your data and how to reproject, transform, or register it into a target coordinate system when necessary is essential for getting the point clouds into the right place. This article introduces the coordinate system principles in GVI platforms and the methodology to reproject, transform, and register a point cloud into a target coordinate system. Please use the content table below to navigate to the subject of interest.
Required Input Coordinate Systems of LiAcquire and LiBackpack-Desktop
When using LiAcquire or LiBackpack-Desktop to post-process the trajectory and/or point cloud collected by LiAir or LiBackpack, the input coordinates must be in WGS84 coordinate system (EPSG 4326), including latitude, longitude, and ellipsoid height. This applied to four scenarios:
Using LiAcquire Pro to post-process trajectory and using Manual mode for Base Station location. The latitude and longitude coordinates of the Base Station location must be in WGS 84 coordinate system, and the height value must be in WGS84 ellipsoid height (unit: meter).
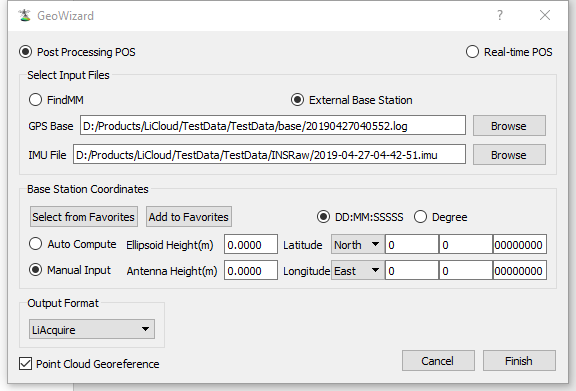 Base Station location setup in LiAcquire Pro
Base Station location setup in LiAcquire ProImporting a processed trajectory file to LiAcquire to georeference point cloud. The latitude and longitude coordinates of the POS records in the trajectory file must be in WGS 84 coordinate system, and the height values of the POS records must be in WGS84 ellipsoid height (unit: meter).
Note: if a processed trajectory file is used, import it in project TRAJECTORIES.
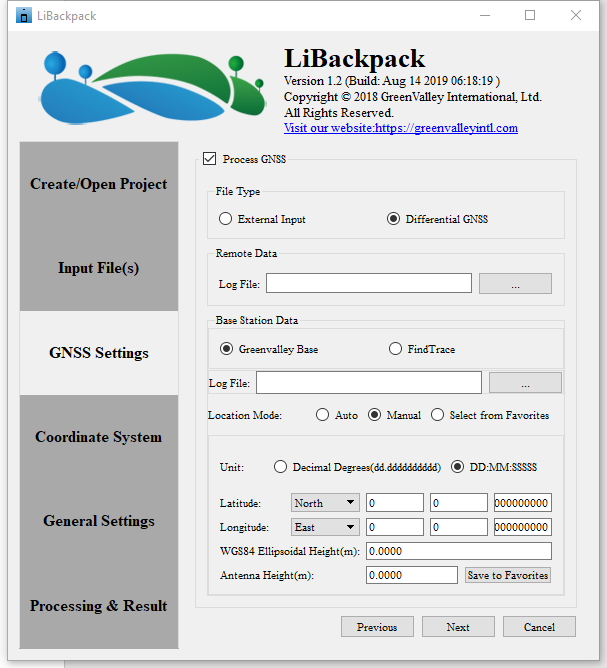
Using LiBackpack-Desktop to post-process trajectory and using Manual mode for Base Station location. The latitude and longitude coordinates of the Base Station location must be in WGS 84 coordinate system, and the height value must be in WGS84 ellipsoid height (unit: meter).
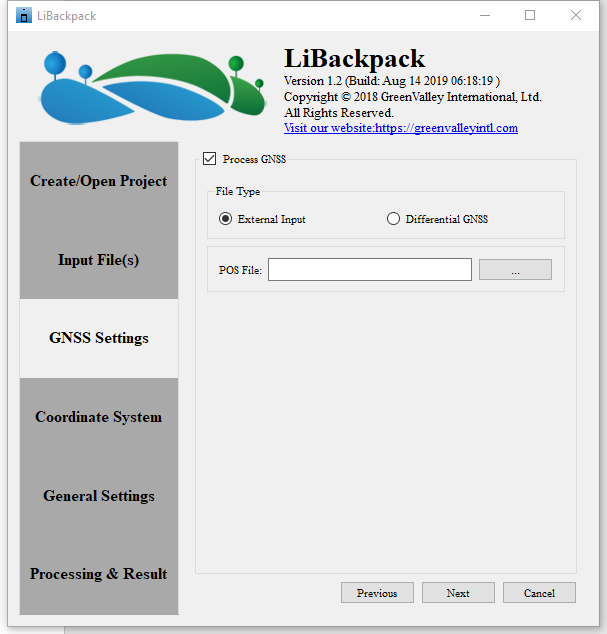
Importing a processed trajectory file to LiBackpack-Desktop to georeference a point cloud. The latitude and longitude coordinates of the POS records in the trajectory file must be in WGS 84 coordinate system, and the height values of the POS records must be in WGS84 ellipsoid height (unit: meter).
Default Output Coordinate System of LiAcquire and LiBackpack-Desktop
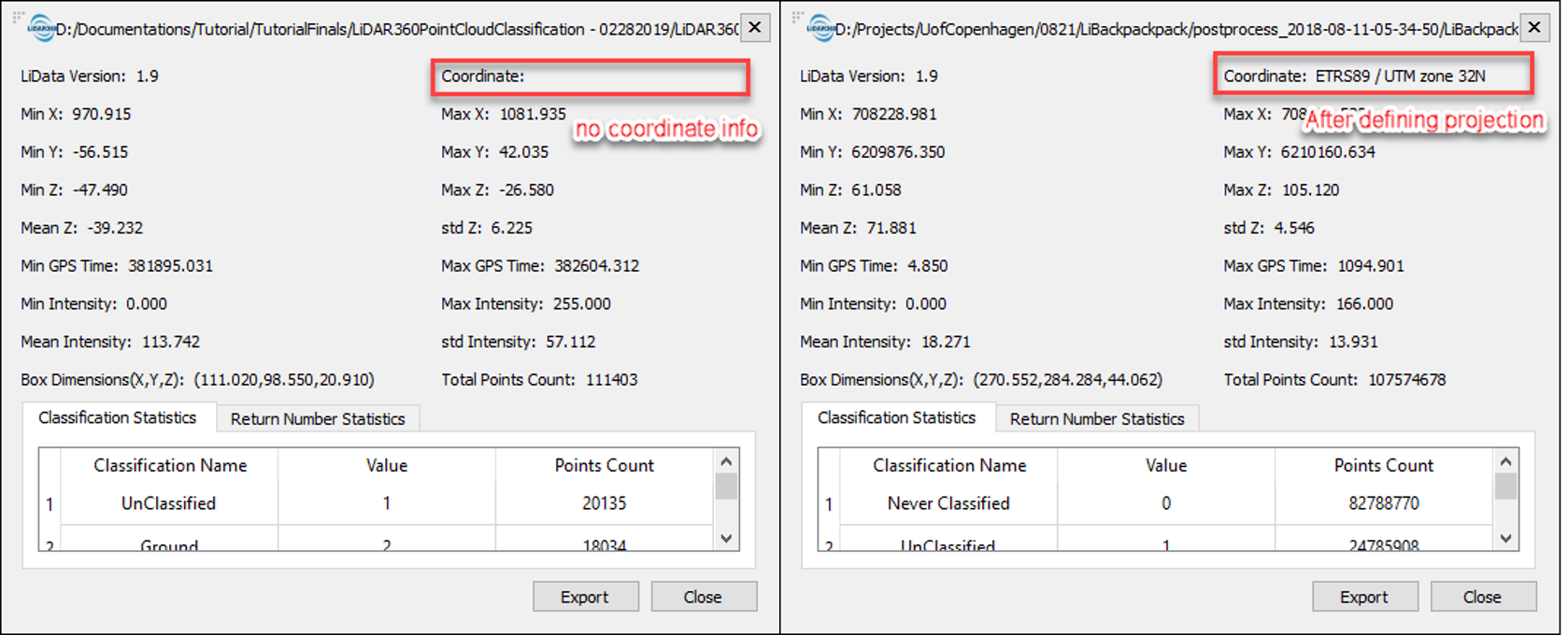
The default output coordinate system of the georeferenced point cloud from LiAcquire and LiBackpack-Desktop is corresponding UTM projection of the scanned area with WGS84 datum (unit: meter). The coordinate system is written into the output point cloud file.
Note: If the point cloud is collected by LiBackapck 50, C50, and D50 – the models without GNSS module, the point cloud post-processed by LiBackpack-Desktop will be in local coordinate system, the origin of which is the starting point of the laser scanner. To georeference such point clouds, please refer to ‘Point Cloud Transformation’ chapter.
Reproject point cloud into another coordinate system
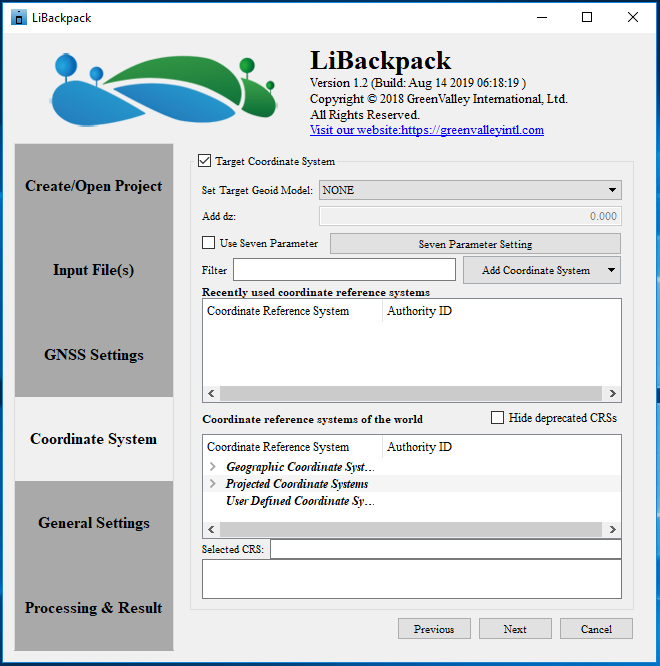
If your target coordinate system is different from the default output coordinate system, you may use reproject function in LiAcquire, LiBackpack-Desktop, or LiDAR360 to reproject the point cloud. The logic and parameter settings of the reproject function in these three software are the same. Please refer to the User Guide of LiDAR360 Reproject tool for instructions: Reproject.
The Repreject tool supports reprojecting the horizontal and vertical coordinate system.
Reproject vertical coordinate system
As discussed above, the default output vertical coordinate system of the point cloud is ellipsoid height of WGS84 datum. Reproject tool supports reprojecting vertical coordinate system to one of these Geoid models: EGM2008, EGM96, EGM84. In addition, if the surveying area is small enough to be considered as spatially homogenous in terms of divergence between ellipsoid height and geoid height, you could set the Geoid model to ‘Custom’, and enter the difference between ellipsoid height and your target geoid model, dz, to adjust the elevation values.
If the surveying area is too large to be considered as spatially homogenous, please refer to Elevation Adjustment chapter for instructions.
Reproject horizontal coordinate system
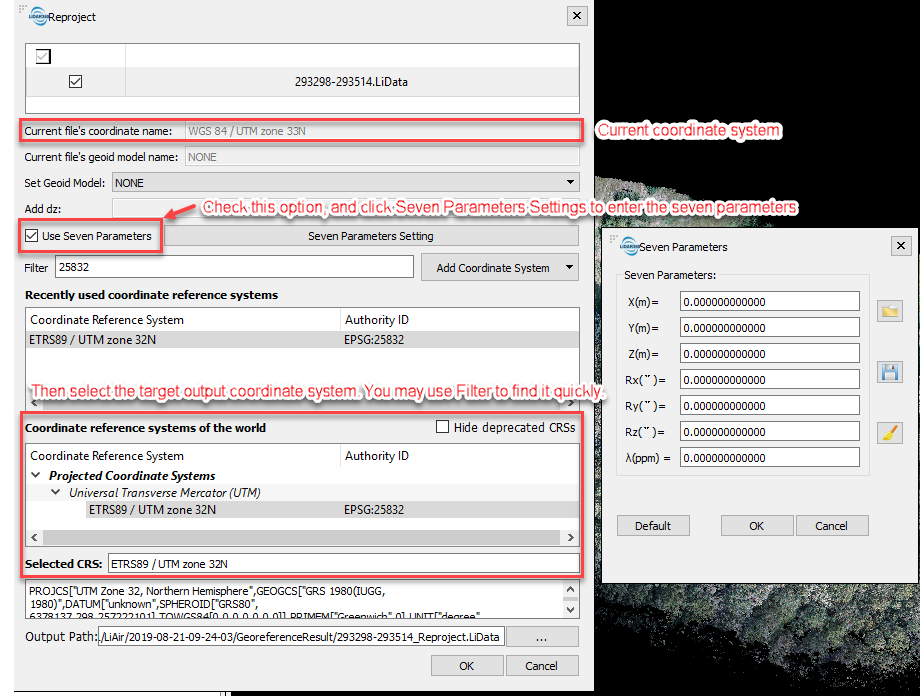
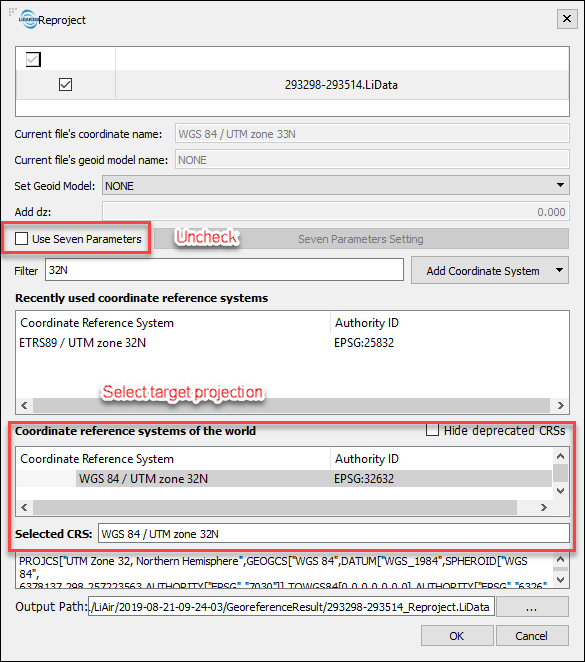
For horizontal coordinate system reprojection, Reproject tool supports using seven parameters to transform datum, and also provides a reprojection database from GDAL for most commonly used coordinate systems of the world. During the reprojection, if the datum is changed, you would need to use the seven transformation parameters first and then select the target projection to use. With at least 3 Ground Control Points, you could use the Seven Parameter Solution tool in LiDAR360 to calculate the seven parameters for transformation and use them in the Reproject tool.
Here is an example of transforming from WGS 84 UTM 33N to ETRS89 UTM zone 32N – a coordinate system used in commonly in Denmark:
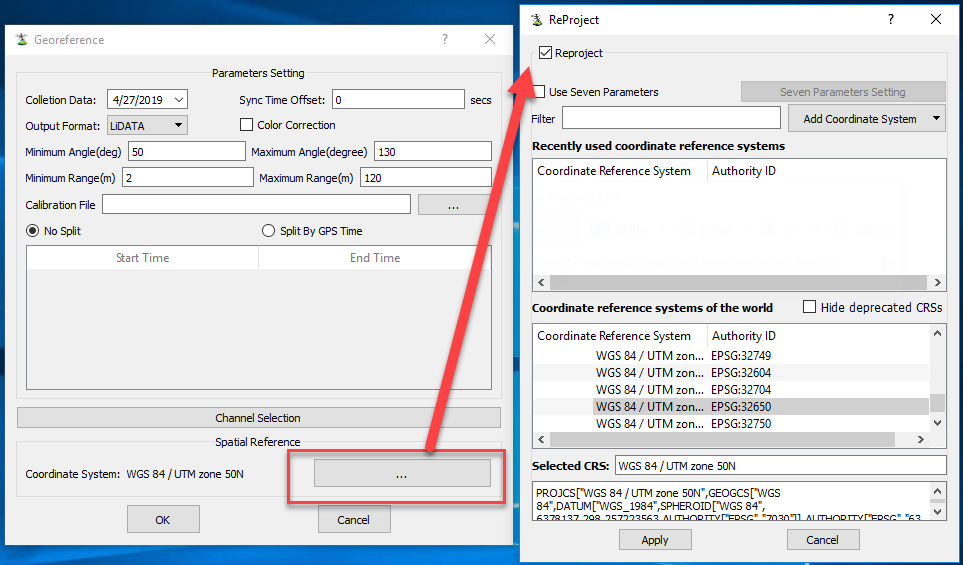
If the reprojection does not invovle datum transformation and it’s only projection change, for example, transforming from WGS 84 UTM 33N to WGS 84 UTM 32N, using seven parameters is not necessary:
Elevation Adjustment
If the target elevation model is not ellipsoid height and is not one of the height models listed in the reproject function - EGM2008, EGM96, EGM84, and cannot be adjusted using a constant value based on ellipsoid height given that the area is too large to be considered as consistently varied from the base, Ground Control Points can be used to adjust the elevation values to a target elevation model. Please follow the guide in this article to achieve the goal: Use GCPs for Elevation Adjustment and Accuracy Assessment.
Note: this workflow only transforms the elevations while the horizontal coordinates will remain unchanged.
Manual Registration using Ground Control Points
If a point cloud is not georeferenced, meaning that it is not associated with real world XYZ coordinates so that it doesn't appear at the right place of the globe, such as a point cloud collected by a LiBackpack system that does not have GNSS system, it could be registered manually using Ground Control Points (GCPs).
In addition, with a point cloud that is already georeferenced, manual registration using GCPs can also be used to enhance the absolute positioning accuracy.
To register a point cloud with GCPs, use the Manual Registration module in LiDAR360, or to register both the point cloud, the trajectory, and the panorama images acquired by LiBackpack, use the Registration module in LiFuser.
LiDAR360 Manual Registration guide: Manual Registration.
LiFuser Registration guide: LiFuser Operation Guide.
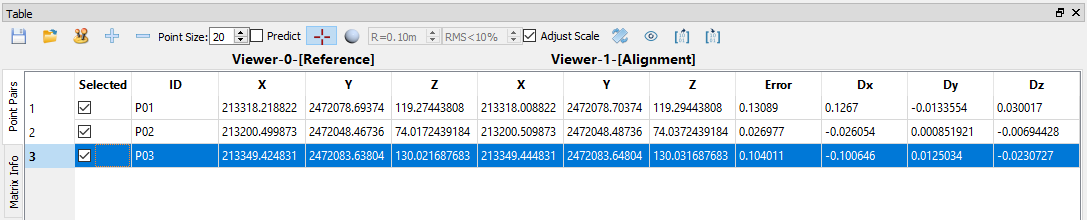
Accuracy Assessment
During point cloud registration, an error matrix is provided, which shows the error after registration for accuracy assessment purposes. Dx, Dy, Dz are the differences of distance in X, Y, Z coordinate between picked point in the point cloud and the corresponding Ground Control Point, and Error is the difference of direct distance from the picked point in the point cloud to the corresponding Ground Control Point.
Define Coordinate System
After manual registration, the new coordinate system of the point cloud needs to be written into the point cloud header info. To do this, use the Define Projection tool to define the new coordinate system of the point cloud.