Exercise 2: Interactive Classification
LiDAR360 users can use the interactive classification tools in Profile window to manually classify points into target classes. In this tutorial exercise, a small subset of the CityRGB.LiData point cloud will be cut from the input dataset and then used as an input to the interactive classification tools included in LiDAR360’s Profile window.
Datasets produced by this Exercise will serve as training datasets in portions of this tutorial that focus on LiDAR360’s Machine Learning Tools. The accuracy of the Machine Learning classification tools is partially dependent on how well the training data represents of the objects of interest as they “appear” in the point cloud data set to which the Machine Learning model will be applied. Therefore, a careful and thorough selection of training samples is important in successful implementation of the Machine Learning classification routines in LiDAR360.
Cut point cloud
1 Change Display option back to RGB ![]() to better identify ground objects.
to better identify ground objects.
In this project, we will classify a point cloud that belong to four target classes: Ground, Building, High Vegetation, and Medium Vegetation. All other points in the input dataset will be left as unclassified (ID-0).
Note that Ground points were classified in Exercise 1 and the Machine Learning training samples generated only for the building, high and medium vegetation classes in this portion of the tutorial.
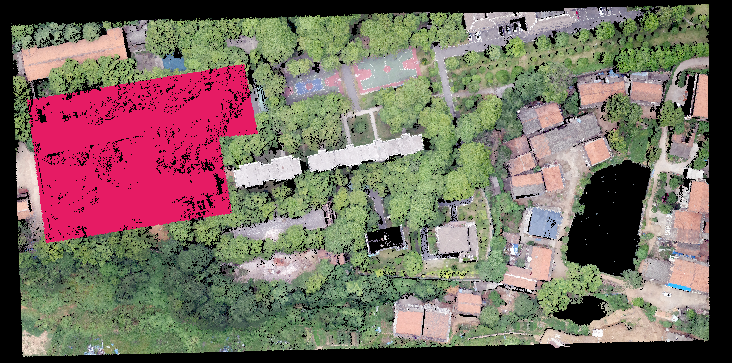
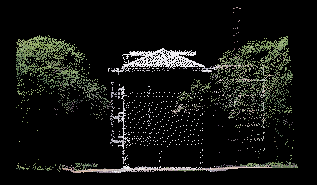
2 Select a region where buildings, high vegetation (trees), and low vegetation (bushes) are all present in the point cloud. Use the Polygon Selection ![]() tool to select a region such as the one as shown below.
tool to select a region such as the one as shown below.

3 Double-click the left mouse button to finish drawing the selection region. The selected session is colored in purple.
4 Click In Cut ![]() tool to cut the selected points from the larger point cloud.
tool to cut the selected points from the larger point cloud.
5 Click Save Cut ![]() tool to save cut point cloud as a new dataset, and then click Yes to add the result to the project.
tool to save cut point cloud as a new dataset, and then click Yes to add the result to the project.
Classify points
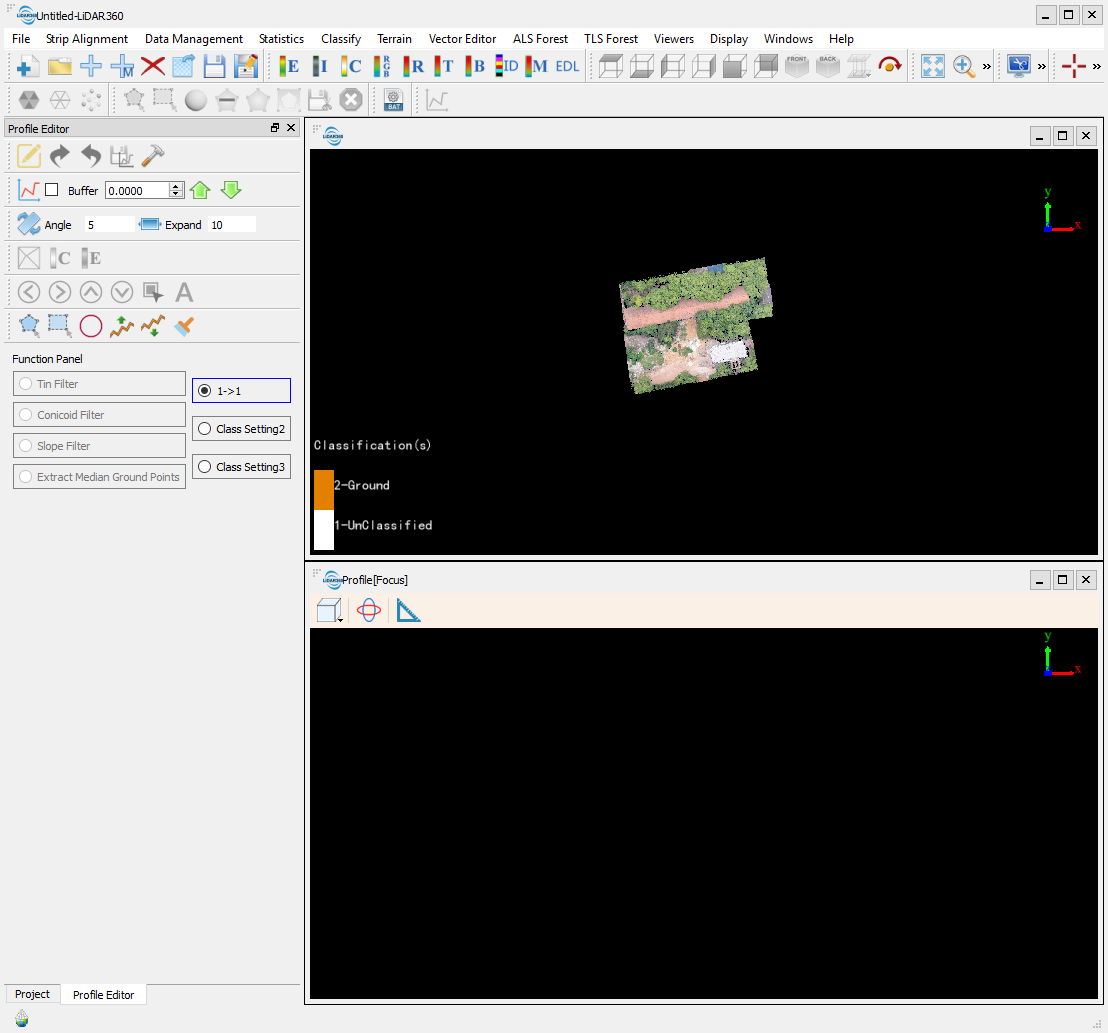
Interactive classification toolsets are located in LiDAR360’s Profile Editor.
1 Under Layers in the Project window, uncheck the CityRGB.LiData point cloud so that the cut result is the only visible layer in the viewer.
2 Click Profile ![]() in toolbar to open Profile Editor.
in toolbar to open Profile Editor.
3 Building and High Vegetation are relatively easy to discern in this example. Therefore, an effective classification strategy would be to first isolate the points belonging to the Building and High Vegetation classes. To do this, Click Profile in Profile Editor, and draw a line along the roof top to create a polygon. Double-click the left mound button to finish selection.
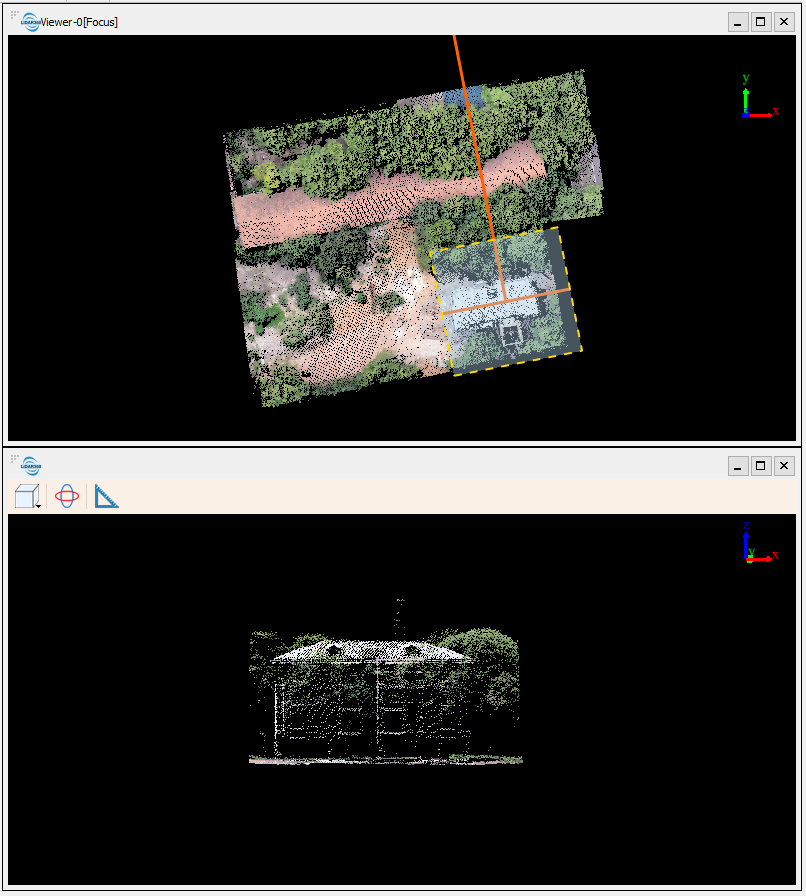
4 Click Viewer Direction > Left View to rotate the view 90 degrees horizontally, at which angle the building is well separated from trees. You could also use the Rotate Mouse ![]() to rotate the view in the Profile[Focus] viewer manually.
to rotate the view in the Profile[Focus] viewer manually.
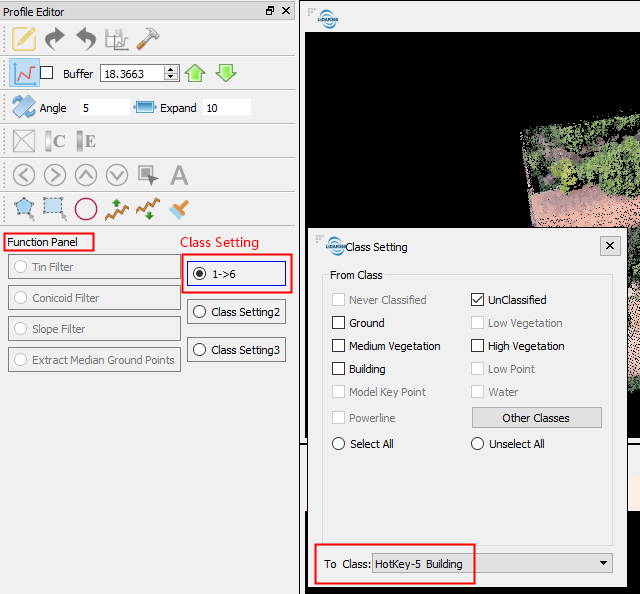
5 Under Function Panel in Profile Editor, click the Class Setting tab, and change the To Class to Building.
6 Use the Polygon Selection tool to select the building points. Double-click to finish selection.
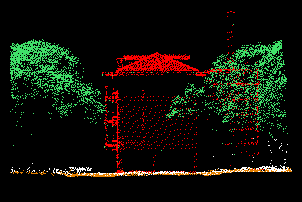
7 Switch the Display option to Class ![]() . The building points selected are displayed in red, the default color for Building Class.
. The building points selected are displayed in red, the default color for Building Class.
8 Click Save Results ![]() to save the classification result.
to save the classification result.
Save the classification result each time before moving on to classify a different class of object in the point cloud
9 Rotate the point cloud loaded in the viewer and classify all building points that can be identified as Building.
10 Double-click Class Setting and then set the To Class to be High Vegetation.
11 Use the same strategy to classify the trees to Class High Vegetation as was used previously in this example to classifying Building points.
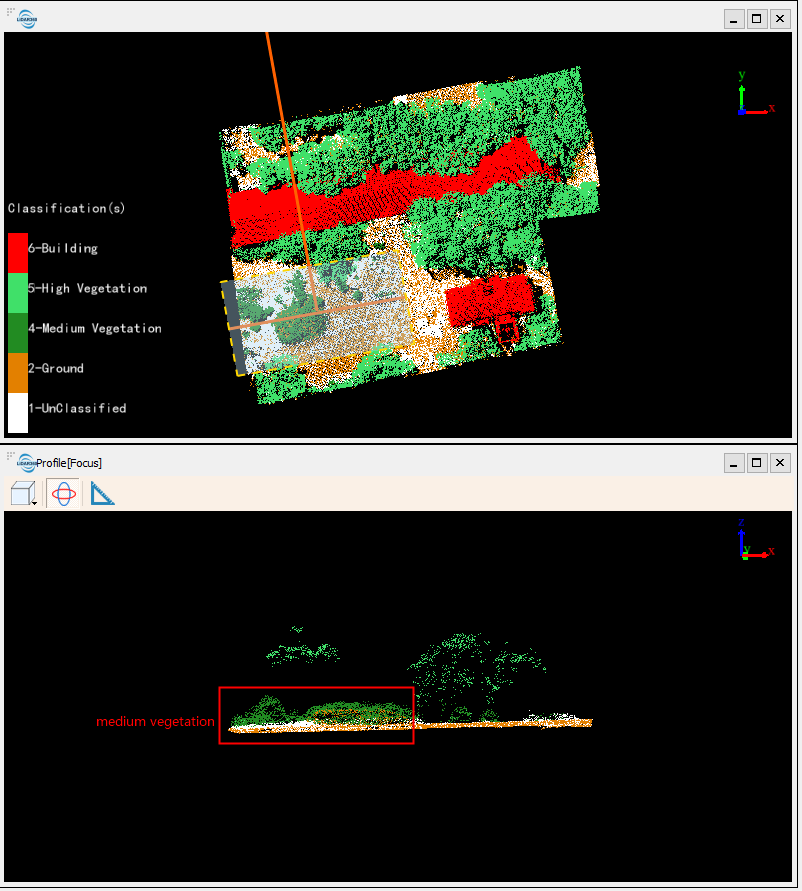
12 Repeat steps 6 to 11 but this time do so to classify the remaining points in the subset point cloud that belong to the Medium Vegetation land cover category.